Entre em contato com o controle do motor por meio de conversores:
O controle do motor CC é obtido conveniente e eficiente por conversores para a fase de controle na qual a tensão de entrada de CA é convertida em uma saída CC controlada.
O processo de comutação, a transferência da corrente de um tiristor para outro, nesses conversores é a comutação natural ou linear barata. Como um tiristor de entrada é ativado, faz com que o oposto do tiristor extrovertido, extinguindo -o.
Portanto, nenhum circuito de comutação adicional é necessário. A eficiência da conversão de energia nesses conversores é maior que 95% devido a perdas relativamente baixas nos tiristores.
Esses conversores são usados no controle de velocidade dos motores fracionários-KW CC, bem como nos grandes motores usados nos discos reversos em velocidade variável para rolos com dimensões do motor tão importantes quanto vários MW.
Em certos tipos de conversores (semi-conversores), um diodo conhecido como diodo de roda livre é conectado nos terminais do motor para permitir a dissipação da energia armazenada na indutância do motor e fornecer uma continuidade do motor quando os tiristores são bloqueados. Também oferece proteção contra sobretensões transitórias.

Conversor de meia onda única:
A Figura 11.14 mostra um conversor de meia onda monofásico para controlar um motor CC excitado separadamente. Requer um único tiristor e um diodo de roda livre. Nesse circuito, a corrente do motor é sempre descontínua, resultando em mau desempenho do motor.

Esse tipo de conversor é usado apenas para motores inferiores a 400 W. Não será descrito em detalhes aqui; Estes resultam facilmente da descrição dos formulários de ondas (tensão e corrente) para o semi-conversor.

Semi-conversor que fornece um mecanismo CC excitado separadamente:
É um conversor de um quadrante (Fig. 11.15a) que fornece uma tensão e uma corrente de polaridade nos terminais CC. Portanto, não prevê a frenagem regenerativa, ou seja, o fluxo de potência do controle do motor CC para a energia CA. Quando a regeneração não é necessária, esse conversor é usado por razões da economia.

A Figura 11.15 (b) fornece os circuitos de um semi-conversor que fornece um controle de motor CC excitado separadamente. A resistência ao reforço da AR e a indutância são representadas em série com um EMF induz pelo quadro enquanto a tensão terminal de ingresso é.
Ele tem dois tiristores, dois diodos e um diodo de roda livre (conectado através dos terminais do motor). Supõe -se que, no funcionamento permanente, a corrente de reforço é contínua em toda a faixa operacional.
As ondas de ondas de potência típicas são representadas na Figura 11.16. O tiristor Th1 é desenhado no ângulo α e Th2 no ângulo π + α em comparação com a tensão da oferta ν e o processo é repetido continuamente.

Sob condições regulares, como Th1 é desenhado (ωt = α), o tubo Th1 e D2 e o motor é conectado à fonte de alimentação, ou seja, νa = ν. Em ωt = π, νa tende a se tornar negativo à medida que a polaridade das tensão de entrada muda.
Isso significa que o DFW, o diodo da roda livre, fica tendencioso para a frente e o fluxo de reforço que flui através do Th1D2 é transferido para o DFW, o que significa que o interruptor Th1 (naturalmente).
Os terminais do motor são curtos-circuitados via DFW para o período de roda livre π <ωt <π + α, fornecendo continuidade da corrente de reforço durante esse período em que o motor permanece desconectado da fonte de alimentação.
Em ωt = π + α, Th2 é desenhado e o Th2d1 acionado, o que significa que o DFW é revertido e, portanto, no circuito aberto. O motor é mais uma vez conectado ao fornecimento do período seguinte de π + α <ωt <2π. Esse processo é repetido continuamente.
Várias formas de tensão e onda de onda de corrente de um controle do motor CC excitado separadamente nutrido por um semi-conversor estão representadas na Figura 11.16. Embora a tensão entre os terminais do motor (Fig.
11.16 (c)) contém harmônicos além de um valor estável de CC, supõe -se corretamente que o motor não responda a esses harmônicos e, portanto, trabalha em velocidade constante (n) e um FEM induzido constante (EA). Como Th1 desenha ωt = α, a corrente do motor é dada por

Até o ponto P ilustrado na Figura 11.16 (a); ν> ea para que a corrente do motor aumente. O mesmo vale para o motor EA EA. Durante esse período, além da energia entregue à carga, a energia também é armazenada na indutância do motor (o).
Além do ponto P, ν
Durante o período de roda livre (π <ωt <π + α), o diodo continua tendencioso pela inversão da tensão indutiva. Durante esse período, parte da energia armazenada na indutância do motor é consumida para alimentar a carga mecânica.
A corrente do motor, a velocidade e o FEM, portanto, reduzem. Esse processo é então repetido durante o período seguinte (π + α <ωt <2π + α) via Th2d1 e posterior por DFW. A corrente extraída do poder ilustrado na FIG.
11.16 (d) é esta parte da corrente de reforço que circula sobre os períodos (α, π), (π + α, 2π), … quando o motor é conectado à fonte de alimentação. Não é necessário usar o diodo em uma roda livre.
Na sua ausência em ωt = π, D1 fica tendencioso de uma maneira antes que a roda livre ocorra através de Th1d1 até que o Th2 seja desenhado. Em ωt = 2π roda livre ocorre através de Th2d2 e assim por diante.
É necessário observar na Figura 11.16 (d) que o fundamental da corrente extraído do setor está atrasado na tensão por um ângulo φ1 (<α).
Corrente de reforço descontinado:
A corrente de reforço se torna descontínua para os grandes valores do ângulo de disparo, os valores de alta velocidade e baixo torque. O desempenho do motor se deteriora com uma corrente de reforço descontínua. A proporção de pico para a média e o RMS para uma corrente de reforço médio aumenta.
Portanto, é desejável operar o motor no modo de corrente direta. Para conseguir isso, pode ser usado um estrangulamento do circuito de reforço externo, o que diminui a taxa de diminuição da corrente durante a operação da roda livre.
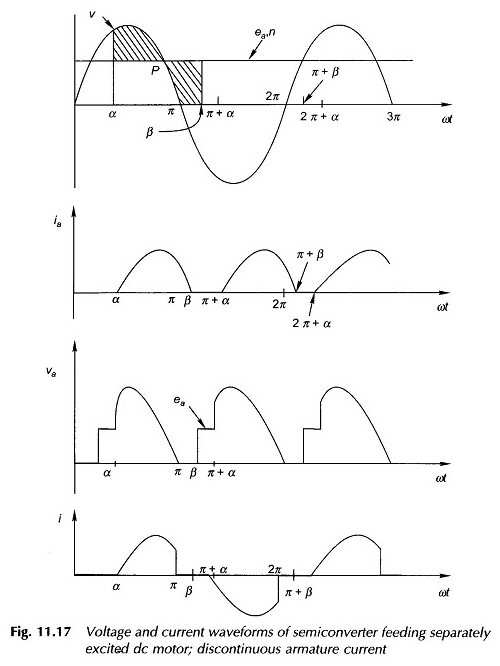
A tensão e as ondas de onda de energia para o semi-conversor com corrente descontínua estão representadas na Figura 11.17. O motor está conectado à fonte de alimentação via Th1d2 para o período α <ωt <π. Além de π, o motor é curto-circuito através do diodo de diodo em uma roda livre.
A corrente de reforço se desintegra a zero no ângulo β (ângulo de extinção) π + α, ou seja, antes de o tiristor Th2 ser desenhado, fazendo a corrente de reforço descontínuo. Durante α a π, o período de condução via Th1D2, a tensão do terminal do motor é a mesma que a tensão de entrada.
Durante π a β, a tensão do terminal do motor é zero porque os terminais do motor são curtos-circuitados pelo diodo da roda livre. De β a π + α, o motor da costa e, portanto, sua tensão terminal é a mesma que a EMF induz.
Conversor completo que fornece um mecanismo CC excitado separadamente:

Um conversor completo é um conversor de dois quadrantes (ver Fig. 11.18 (a)) no qual a polaridade da tensão da saída pode ser revertida, mas a corrente permanece unidirecional devido aos tiristores unidirecionais.
Um conversor completo emprega quatro tiristores, mas nenhum diodo de roda livre é necessário. Um conversor completo que fornece um controle de motor CC excitado separadamente é ilustrado na Figura 11.18. A tensão e as ondas de onda de corrente são representadas na FIG.
11.19 com a hipótese de que a corrente de reforço da IA é quase constante. Tiristores Th1 Th3 chumbo para o intervalo α <ωt <π + α e conecte o motor à fonte de alimentação. Em π + α, os tiristores Th2th4 são acionados.
Imediatamente, a tensão de suprimento aparece no viés oposto através do Th1 Th3 e os apaga. É uma comutação natural ou online. A corrente do motor é transferida de Th1 Th3 para Th2th4.
Como não há período em que o motor seja desconectado da fonte de alimentação, nenhuma roda livre é necessária. Durante α a π, a energia flui da fonte de alimentação para o motor (ν e eu é positiva, assim como ir e IA).
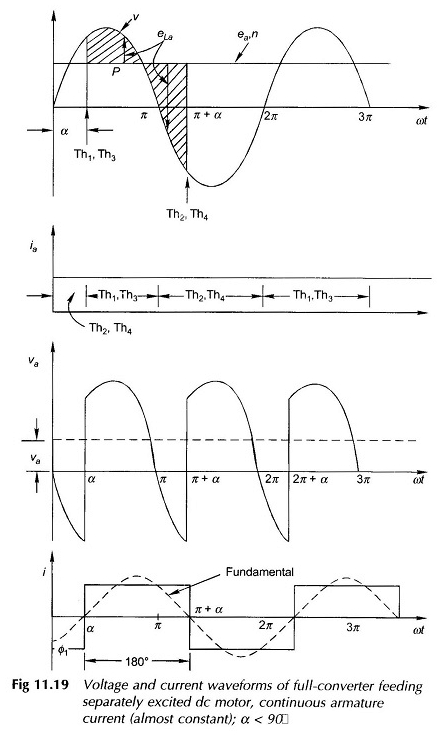
No entanto, durante π a π + α, parte do motor do motor é retornada à fonte de alimentação (V e eu tenho uma polaridade oposta, assim como Va et Ia, o que significa a inversão do fluxo de potência). Observe que o fundamental da corrente retirado do setor está atrasado por trás da tensão pelo ângulo φ1 = α.
A tensão e as ondas de onda de corrente para α> 90 ° estão representadas na Figura 11.20. A tensão média do terminal do motor agora é negativo. Se os terminais do motor forem revertidos, ele atuará como uma fonte de alimentação do gerador para a energia CA.
Esta é a operação de reversão do conversor e é usada na frenagem regenerativa do motor. Um ponto deve ser observado aqui.
Durante o período de condução Th1th3 ou Th2th4, à medida que a tensão da oferta se torna negativa, a corrente de reforço começa a reduzir, causando o oposto da polaridade da indutância, para que os tiristores condutores continuem sendo tendenciosos.
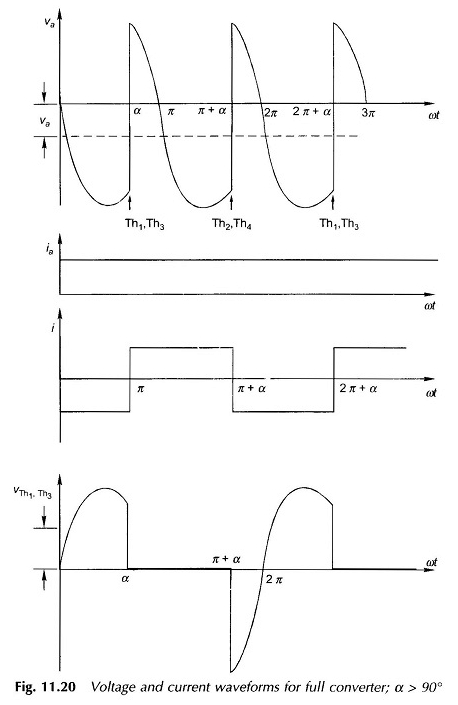
A tensão e os onda de onda de corrente para o caso de corrente de reforço descontínuos podem ser encontrados como no caso do semi-conversor. (Veja a Fig. 11.20).
Características da velocidade de torque:
Assumimos aqui que a corrente de reforço é contínua. Para um semi-conversor com uma ação de diodo de roda livre, as equações incomuns do circuito são
Para um conversor separado

Seja ν = √2 v sin ωt. As tensões médias do terminal do motor são: com um semi-conversor,

Com um conversor completo,

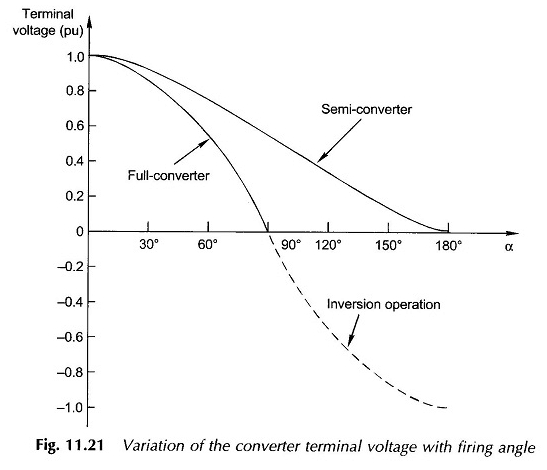
A Figura 11.21 fornece a variação na tensão do terminal do motor em função do ângulo de disparo para o semi-conversor e o conversor completo. No caso da operação completa da inversão de inversor, ocorre por 90 ° <α <180 °.
Equações motoras para valores médios são

E

Substituindo a equação. (11.8) e VA das equações (11.5) ou (11.6) na equação. (11.9), as mudanças de marcha são dadas da seguinte forma:
Com um semi-conversor,

Com um conversor completo

O primeiro termo das equações. (11.10) e (11.11) representam a velocidade teórica da não carga, enquanto o segundo termo representa a queda de velocidade causada pela resistência do reforço. A velocidade teórica sem carga pode variar pelo ângulo de tiro α.
No caso de uma corrente descontínua, a tensão média nos terminais do motor depende do ângulo β (ângulo de extinção), que depende da velocidade do motor médio n, da corrente média do motor IA e do ângulo de tiro α. O tratamento analítico deste caso vai além da estrutura deste livro.
Conversor duplo:
O conversor duplo pode operar nos quatro quadrantes, como mostrado na Figura 11.22 (a). Seu circuito é representado na Figura 11.22 (b). Estes são dois conversores completos que se convertem em DC em ambas as direções. O conversor duplo fornece inversão praticamente instantânea da tensão nos terminais CC.

Controle do motor da série DC:
Semi-conversores e conversores completos também são usados para controlar um mecanismo da série DC. A indutância total do circuito é alta devido ao campo da série, consequentemente, cuja corrente de reforço é principalmente contínua.
As equações motoras que governam diferem porque o fluxo / pólo agora é proporcional à corrente de reforço. O tratamento é semelhante ao de um controle do motor com corrente contínua excitada e não será continuada aqui por falta de espaço.