Equação de torque do motor de corrente contínua:
Quando a tensão CC é aplicada à estrutura de um motor de corrente contínua com seu campo excitado por CC, um torque é desenvolvido e o reforço é executado.
Motor cc
Ele acelera a uma velocidade com que a EMF induz na égis do reforço equilibra a tensão aplicada e a seguinte equação de torque do motor CC é satisfeita.
![]()
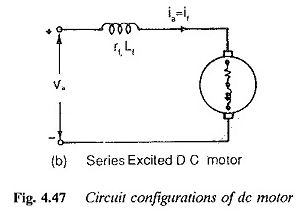
O EB é o EMF induz no reforço devido à rotação no campo magnético uniforme em velocidade constante N. A natureza desse EMF é se opor à tensão terminal e, portanto, também é chamada de EMF. As condições do circuito são representadas na Figura 4.47.
A Figura 4.47 (a) representa um motor excitado separadamente, quando a excitação é fornecida por uma corrente independente da IA. A Figura 4.47 (b) ilustra um mecanismo de série no qual os campos e campos são os mesmos. A tensão gerada é dada por

Ou
- Φ é um fluxo por pólo
- Z é uma série de drivers inmarg
- N é velocidade na dieta
- 2p é o número de pólos
- 2a é o número de caminhos paralelos no quadro
Para um determinado CC leva à equação básica da máquina básica
![]()
Ou 
A equação de torque do motor de corrente contínua desenvolvida pelo quadro é dada por

Ka é chamado de constante inmature do motor.

Usando as eqs 4.23 e 4.25, temos

Em um motor excitado separadamente, φ pode ser constante em uma determinada corrente de campo quando a reação do reforço é negligenciada ou compensada.
Da equação. 4.27 É claro que a velocidade de um motor CC pode variar modificando o valor de (VA – IARA).
A equação de torque do motor DC é normalmente realizada de duas maneiras:
- Variando o valor da tensão aplicada ao reforço, como é feito no sistema Ward Leonard (Fig. 4.48).
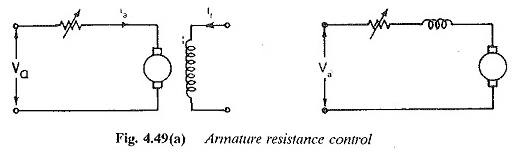
- Inserindo resistência adicional em série com o reforço (Fig. 4.49).


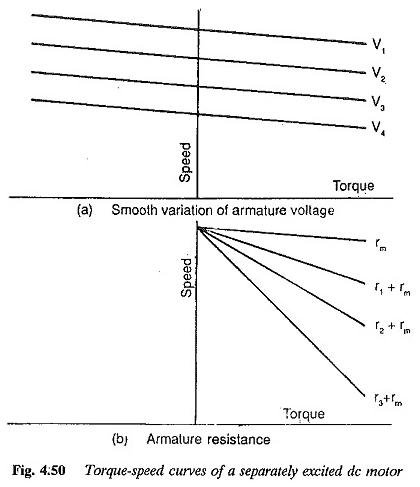
No primeiro, é necessária uma fonte de alimentação de tensão variável. A operação é sem perdas e eficaz. A equação de torque do motor CC, dependendo da característica de velocidade, é ilustrada na Figura 4.50. Neste último, uma resistência adicional inserida envolve perdas adicionais e o motor se torna menos eficaz.
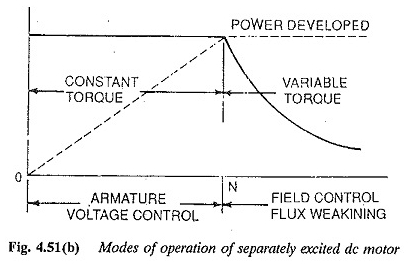
A equação de torque de velocidade da característica do motor CC é representada na Figura 4.51. Nos dois casos, são possíveis velocidades muito pequenas até a velocidade zero. O motor opera com um torque constante de zero à velocidade básica.

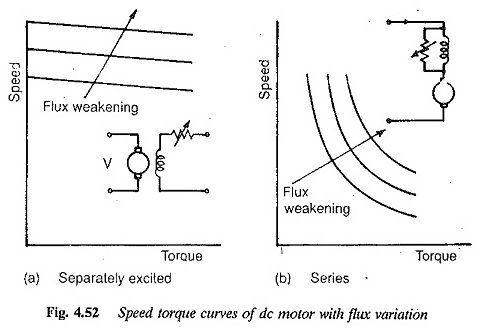
A velocidade de um motor CC também é variada pela variação no fluxo de campo. As velocidades acima das velocidades básicas são possíveis neste método de controle. Este método é adequado para cargas de torque variáveis.
O controle de velocidade usando tensão variável é muito eficaz. Essa tensão variável é obtida de um gerador. O método é conhecido como método Ward Leonard. É muito versátil e tem os seguintes recursos:
- O motor pode ser acelerado para o torque constante (corrente de reforço constante) ajustando adequadamente o campo do motor.
- A frenagem regenerativa do motor é possível e o motor pode ser colocado para descansar muito rapidamente.
- Quatro operar o quadrante do motor é simples.
- O custo de capital é maior, porque é necessário um conjunto adicional de MG.
- O equipamento requer espaço.
O advento dos tiristores e o desenvolvimento de conversores de energia usando tiristores tornaram o controle da velocidade dos motores elétricos mais fácil e simples. Os retificadores de controle de fase fornecem uma tensão CC variável à estrutura de um motor CC (Fig. 4.53).
Esses conversores também podem operar como inversores; nesse caso, a frenagem regenerativa do motor de corrente contínua é possível. Por uma conexão apropriada desses conversores, é possível um treinamento reversível, permitindo um automóvel e regeneração nas duas direções de rotação.
Esses conversores são mais flexíveis, têm uma resposta mais rápida e ocupam menos espaço. Um sistema estático de Leonard Ward pode ser possível usando esses conversores.
No entanto, existem certas desvantagens, como um fator de potência ruim no lado da CA devido à corrente tardia, a corrente de entrada não sinusoidal com um rico conteúdo harmônico, etc. A tensão de carregamento é sobreposta por um conteúdo de onda.
A corrente de carregamento também possui uma ondulação com corrente média e RMS relata para uma corrente média maior que uma. Uma grande indutância é necessária na lateral da carga para suavizar a corrente. Às vezes, a corrente de carregamento é descontínua, o que reduz o desempenho.
O conteúdo da ondulação afeta o aquecimento e a troca do motor. Consequentemente, é necessário desenvolver o retificador que fornece uma fonte de alimentação ao motor que causa muito poucas variações no desempenho em comparação com uma fonte de alimentação de corrente direta normal. Às vezes, o design do motor CC é modificado para que possa ser usado em qualquer conversor.

Um mecanismo CC na energia normal do CC requer a resistência inicial para limitar a corrente de início -up. Quando nutrido a partir de um conversor de tiristor, a resistência inicial pode ser distribuída e o início suave é possível. O motor pode ser acelerado para o torque constante.
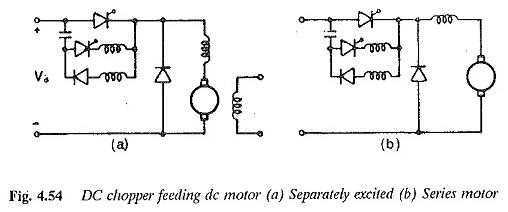
O Hopper CC pode ser interposto entre as almofadas de rolagem de tensão fixa e o mecanismo CC fornece uma tensão variável ao motor para controlar a velocidade. A regeneração também é possível neste caso. Um esquema da Leonard Static é possível para as operações de dois e quatro quadrantes.
A tensão de saída do helicóptero está na forma de pulsos. A relação de tempo do helicóptero pode ser controlada para variar a tensão média. A corrente de saída varia exponencialmente durante a ton e o toff do helicóptero. A corrente de saída varia entre dois limites.
Existe a possibilidade de condução descontínua se a ondulação for maior e a corrente de carregamento for pequena. A tremonha também pode ser verificada com limites de corrente especificados, sendo o método conhecido como controle de limite atual. Isso corrige a frequência de helicópteros.
O conteúdo de ondulação pode ser limitado por uma escolha apropriada de limites. O controle do limite atual é menos sujeito a condução descontínua. O aumento na frequência dos helicópteros introduz perdas. Iniciantes e aceleração doces são possíveis.
Como a bateria fornece alimentos, problemas de conteúdo harmônico e o fator de potência estão ausentes.
O desempenho de um motor CC ao operar em conversores controlados em helicópteros de fase ou DC diferem muito do desempenho quando a fonte de alimentação CC normal é operada.
O conteúdo atual fretado afeta o desempenho do motor, enquanto os harmônicos e o fraco fator de potência afetam o desempenho da linha. Uma compreensão do comportamento ajuda a melhorar o conversor ou o design do motor, para obter melhor desempenho.