Motor CC sem escovas:
O termo motor CC sem vassouras é aplicado a inúmeras configurações de motores síncronos CA nos quais o controle de semicondutores é usado para controlar as correntes do estator, como o torque máximo, é obtido a uma determinada velocidade.
Em um motor convencional, o contator mecânico, o interruptor, mantém o deslocamento de graus a 90 ° entre os campos magnéticos do rotor e o estator para fornecer o torque necessário.
Teoricamente, as funções do estator e do rotor de uma máquina podem ser revertidas, o que coloca o sistema de campo no rotor.

Não há vantagem a ser vencida se uma troca convencional for usada, porque os cortes são fixos e a engrenagem do pincel deve girar na velocidade do campo do rotor.
A mudança para semicondutores por transistores ou tiristores, desencadeada por sensores de posição, pode, no entanto, substituir a engrenagem de escovas por uma comutação totalmente eletrônica, dominando pequenas máquinas por uma planta de controle precioso.

Neste método, cada fase do enrolamento do estator é sequencialmente energética por um transistor de potência (ou tiristor) por meio de um sinal do sensor de posição colocado no rotor.

Devido à luz de fundo da posição do rotor tiristor / transistor, o campo do estator e do rotor ainda está em sincronismo porque a frequência do gatilho se ajusta automaticamente à velocidade do motor. O comprimento dos tempos de transistores determina a amplitude do torque do motor.
Assim, por meio de circuitos eletrônicos, a vassoura sem motores de vassoura pode ser verificada quanto a uma operação de torque constante e variável.
Os motores CC sem vassoura, geralmente são mais caros para a mesma nota de KW, que erros e motores escovados têm certas vantagens em comparação com os motores convencionais.
Vantagens do CC sem motor de vassoura:
- Eles exigem pouca ou nenhuma manutenção.
- Eles têm uma vida operacional muito mais longa.
- Não há risco de explosão ou possibilidade de radiação de RF devido ao arco.
- Eles não produzem escova ou partículas ou trocam de gás como subprodutos de operação.
- Eles são capazes de operar submetidos em fluidos, gases combustíveis e podem até ser fortemente selados.
- Eles geralmente são mais eficazes do que os servos da escova ou os motores DC convencionais.
- Eles fornecem uma resposta mais rápida e um torque de saída bastante linear em comparação com a característica de corrente de entrada, que se presta a aplicativos servo.
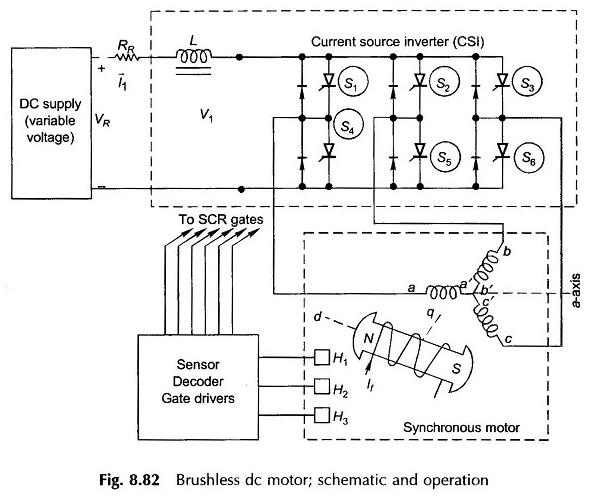
Princípio do diagrama e operação de mecanismo CC sem vassouras:
O diagrama esquemático de um motor CC de vassoura é ilustrado na Figura 8.82. Ele também mostra as três fases do estator (reforço) e o rotor com eixos d e q indicados.
O estator é conectado a uma fonte de corrente de tensão variável por meio de uma indutância e um inversor, incluindo seis SCR (S1 a S6). Em vez dos SCRs, o transistor de potência ou o FET podem ser usados de acordo com a potência do motor.
Os diodos são conectados através dos SCRs para protegê -los da tensão L (DI / DT) induzida na bobina de reforço em comutação.
Os sensores de posição colocados no rotor fornecem um sinal para decodificadores de sensores e drivers de grade que causam uma sequência de sequência na sequência para estar em sincronismo com a posição mecânica do rotor.
Os campos do estator e do rotor se trancam e permanecem em sincronismo a qualquer velocidade do rotor.
As correntes de fase ideais são impulsos de ± I durou a 120 °, selecione cada metade e movidos entre si para 120 ° de fase para a fase, conforme indicado na Figura 8.83. As formas de corrente reais diferem das ondas de corrente retangulares ideais por aumento e queda gradual.
Tal inversor, onde a corrente está fluindo na forma de impulsos de corrente constantes é conhecida como Serivotador atual (CSI).

A sequência de tiro no inversor, como mostrado na Figura 8.83, decorre imediatamente das formas de corrente de fase. Para esta sequência de disparo de 120 ° ou 60 ° SCR, os códigos de sensor espaçados são gerados usando sensores de luz sensíveis ou efeito salão.
A Figura 8.84 ilustra o caso do espaçamento de 120 ° no qual esses sensores sensíveis à luz são representados a 120 ° fixo, obtendo luz de uma fonte de luz fixa.
O rotor carrega um disco do interruptor com um corte de 180 ° para que, quando funcione com o rotor, os sensores de luz recebam uma luz de 180 ° e estejam escuros por 180 °. Os sensores produzem a lógica “1” enquanto recebem uma luz e uma lógica “0” durante o escuro.
É fácil ver que os três sensores (fixo) e o disco de comunicação (rotativo com o rotor) produzem uma sequência de código do sensor, conforme indicado na Figura 8.83, a partir do qual os circuitos eletrônicos geram impulsos de gatilho para puxar SCRs na sequência, conforme indicado na figura.
A posição relativa do disco de comunicação pode ser ajustada os pólos do rotor (eixo iewrt d e q). Para a posição instantânea do rotor (com discos fixos conforme indicado), observamos que o código do sensor simplesmente passará de 101 a 100.
A fase “A” está no meio de seu impulso atual quando a corrente passa da Fase B a C. Nesse momento, o campo do estator resultante de F̅1 é orientado ao longo do eixo A, como mostrado na FIG.
8.83 (a direção positiva da corrente automotiva se opõe à direção positiva do FMF induzido); Verifique a fase “A” aplicando a regra da mão direita de Fleming. O pólo norte do estator é assim orientado ao longo do eixo A.

Este pólo norte empurra o rotor norte para criar um torque de automóvel (o ângulo entre o rotor e o estator n-sples é β). Um marcador de índice pode ser feito no disco do comutador que sempre aponta para o estator norte, enquanto o campo do estator é executado em sincronismo com o rotor.
Este índice produz um ângulo γ com o eixo q do rotor (eixo D tardio 90 °). Obviamente (β + γ) = 90∘. O ângulo pode ser ajustado movendo o disco de comunicação no eixo ligado aos pólos do rotor.

Um motor de corrente contínua do ímã permanente usando sensores de efeito da sala com espaçamento eleitoral de 60 ° é ilustrado na Figura 8.85. Os sensores geram lógica 1 ‘quando expostos a n-pole e “0” caso contrário. A sequência do código do sensor para esse arranjo é facilmente visualizada e é fornecida na Figura 8.83.
Com o H3 localizado ao longo do eixo A, o código do sensor na posição do rotor indicado vai de 000 a 001, o que significa que a corrente está no meio da condução para a fase “A” e vai de B a C. Assim, a F1 é direcionada ao longo do eixo A ou o estator N-POLE está ao longo do eixo G IE
γ = 0 (ver Fig. 8.84). Os motores ímãs permanentes são geralmente ajustados para esse valor de γ (isso corresponde a β = 90 °, melhor para a produção de torque).
Diagrama do circuito do motor CC sem escovas:
O modelo de circuito Novotny-Abbas de um CSI nutrido com motores CC sem vassouras é desenhado na Figura 8.86. As correntes (equilibradas) que fluem para a máquina síncrona da máquina CC sem escovas configuradas na Figura 8.82 são pulsos retangulares ACC, conforme indicado nos ondas da Figura 8.83.
Correntes reais são impulsos um tanto arredondados. Nossa análise será baseada na corrente CA fundamental e as correntes harmônicas serão ignoradas. Eles produzem campos de airpips harmônicos espaciais que, como um campo não estacionário, o campo do rotor produz um torque líquido zero.
Para sair
I1 = atual alimentado pelo inversor pela fonte DC
ENTÃO
IM (fase atual RMS = corrente fundamental
= (√6 / π) i1; pode ser mostrado pela série Fourier
Na Figura 8.86 (a), o modelo de máquina síncrona é o habitual caracterizado pela reatância síncrona do eixo retual XD e pela excitação EMF EF, onde XD e EF variam diretamente com a velocidade que governa a frequência operacional.
A amplitude da EF está obviamente ligada à corrente do campo do rotor pela característica da magnetização. O diagrama de fase correspondente é desenhado na Figura 8.86 (b) em que IM, a corrente de fase, é desenhado em V (tensão de saída / tensão do terminal da máquina síncrona) pelo ângulo φ. A operação principal atual é realizada porque contribui para a extinção da corrente na comutação SCR.

Agora criaremos o modelo CA do CSI com as condições:
- Iae = im
- O parâmetro do circuito do modelo é a resistência do RAE.
- EGE e IAE estão em fase.
Essas condições garantirão que essa parte do modelo represente a máquina CC equivalente.
Também vemos na Figura 8.84 que o ângulo de fase entre i̅m = ̅ae e EF é de fato o ângulo γ. Agora assimilando o poder convertido por fase da máquina síncrona à da máquina DC equivalente que temos

Traduza este resultado no diagrama de fases (Fig. 8.86 (b)), fica claro que V e EGE estão ligados por uma reatância fictícia XE, conforme indicado no circuito da Figura 8.86 (a). Agora, teremos o relacionamento para o Tev e Rae. Negligenciar perdas no inversor

Imagine um curto -circuito em Ege, ou seja, EGE = 0, temos
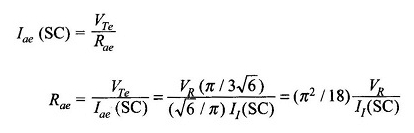
Mas
Vr / i1 (sc) = rr; Resistência do retificador interno que fornece o inversor
ENTÃO
![]()
Características do motor CC sem escovas:
Em referência à Figura 8.84 (c)
![]()
Como já mostrado na equação. (8.121)
![]()
Mas a EF pode ser escrita como
![]()
Ou
- Φf = fluxo / pólo causado apenas pelo ato.
Substituindo valores na equação. (8.124)
![]()
Ou

Com exceção do efeito do COS γ, essa equação é a mesma da máquina CC convencional.
O casal desenvolvido é dado por
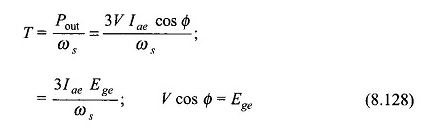
Usando a equação. (8.126), recebemos
![]()
Se a característica da magnetização é supostamente linear
![]()
As equações de velocidade e torque são então
Em um motor síncrono, como a corrente de campo é reduzida, seu PF se torna mais atrasado. Mas em um motor CC sem escovas (que é um motor síncrono com feedback na posição do rotor), a diminuição da corrente de campo se causa um aumento na velocidade de acordo com a equação.
(8.131) Como em um motor CC convencional. Isso pode ser explicado qualitativamente pelo seguinte raciocínio. Em referência à Figura 8.86, como se fosse reduzida, a EF e a EGE são reduzidos e que o RAE é muito baixo, isso causa um aumento desproporcional no IAE = IM.
O resultado é a aceleração do rotor. O aumento na velocidade do contador do rotor a redução da EF e que o IM aumenta à medida que a queda de tensão IMXD aumenta com o aumento da frequência operacional. O resultado é uma operação regular em uma velocidade nova e mais alta para menos em mente ou até tarde.
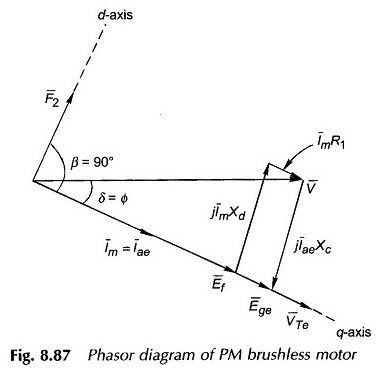
Motor DC sem vassouras PM:
O pequeno motor de corrente contínua PM geralmente é de tipos de PM. Nesse rotor do motor, o MMF F2 permanece fixo e também o ângulo γ nessas máquinas é definido como zero, o que significa que F2 e F1 (MMF de reforço) são movidos por um ângulo de 90 ° (melhor para o torque desenvolvido).
Além disso, a resistência ao enrolamento da fase R1 não é insignificante e, portanto, deve ser adicionada ao RAE no modelo DC. O diagrama de fase para γ = 0 é desenhado na Figura 8.87, no qual as seguintes observações são feitas
- XC = reatância capacitiva = xD (em amplitude).
- O ângulo de PF está atrasado.
O relacionamento das equações. (8.127) e (8.129) para velocidade e torque aplicam -se com exceção da equação. (8.124) agora muda como
![]()