Tipos de motor CC:
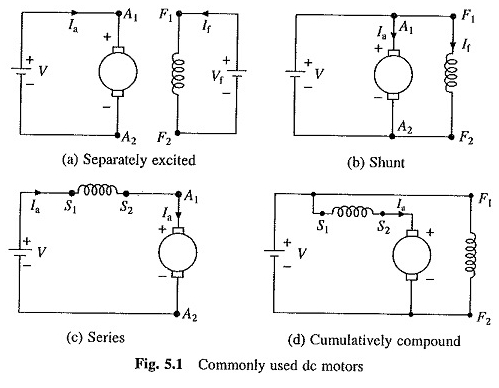
Os tipos de motor de corrente comumente usados são representados na Figura 5.1. Em um motor excitado separadamente, as tensões de campo e reforço podem ser controladas independentemente uma da outra. Em um motor de derivação, o campo e o reforço estão conectados a uma fonte comum.
Motor cc (motores cc, tipos de motores de corrente contínua)
No caso de uma série em série, a corrente de campo é a mesma que a corrente de reforço e, portanto, o fluxo de campo depende da corrente de reforço.
Em um motor composto cumulativo, a força magneto-motiva do campo da série é uma função da corrente de reforço e está na mesma direção que o MMF do campo de derivação.
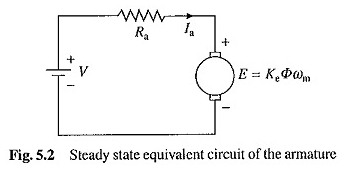
O circuito equivalente ao estado de equilíbrio da estrutura de uma máquina CC é ilustrado na Figura 5.2. A resistência à AR é a resistência do circuito de reforço.
Para motores separadamente excitados e de derivação, é igual à resistência do reforço do reforço e dos motores em série e compostos, é a soma da resistência do enrolamento da estrutura e do campo. As equações básicas aplicáveis a todos os tipos de mecanismo CC são

Ou
Φ – é o fluxo por pólo, Webers;
Ia – a corrente de reforço, a;
V – a tensão do r -rip;
RA – a resistência do circuito incomum, ohms;
Ωm – a velocidade do reforço, rad / seco;
T – o torque desenvolvido pelo motor, nm; E
Ke – a constante do motor.
Da equação. (5.1) para (5.3) 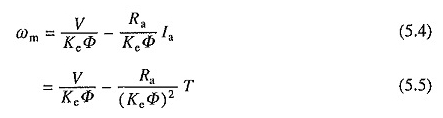
Fisicadores e excitado separadamente:
Em caso de derivação e motores excitados separadamente, com uma corrente de campo constante, o fluxo pode ser suposto constante. Para sair
![]()
Depois das equações. (5.1), (5.3) e (5.4) a (5.6)

As características da velocidade e os esmagamentos de cortiça de um motor excitado separadamente para a tensão do terminal e o campo completo estão representados na Figura 5.3. A curva de velocidade Torca é uma linha reta.
A velocidade de carregamento livre de carga ωm0 é determinada pelos campos de reforço e excitação de campo. A velocidade diminui à medida que o torque aumenta e a regulação da velocidade depende da resistência do circuito de reforço (Eq. (5.10)). A queda usual na velocidade da carga total, no caso de um motor de tamanho médio,

é cerca de 5%. Os motores excitados separadamente são usados em aplicações que exigem boa velocidade e velocidade ajustável.
Motor da série:
Nos motores seriais, o fluxo depende da corrente de reforço. Na região característica de magnetização insaturada, φ pode ser proporcional à IA. Então,
![]()
Substituindo em equações. (5.3), (5.4) e (5.5) fornece
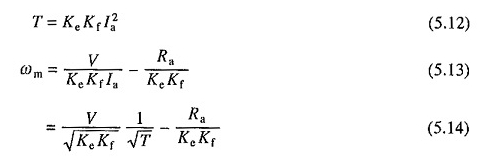
onde a resistência ao circuito do reforço da AR é agora a soma dos resistores de enrolamento do reforço e do campo. As características de torca e corrente corque de um motor em série na tensão de campo nominal e completa estão representadas na Figura 5.3.
Os motores da série são adequados para aplicações que exigem alto torque de partida e sobrecargas de torque pesado.
Dado que o torque é proporcional à corrente de reforço para o quadrado, para o mesmo aumento no torque, o aumento da corrente do motor é menor em comparação com o de um motor excitado separadamente, onde o torque é proporcional ao reforço.
Assim, durante as sobrecargas de torque pesado e o início -up, a sobrecarga de energia na fonte e a sobrecarga térmica do motor são mantidas limitadas a valores razoáveis. De acordo com a Eq. (5.14), como a velocidade varia inversamente como a raiz quadrada do torque, a máquina funciona em alta velocidade com carga de luz.
Geralmente, a resistência mecânica de um tipo de motor de corrente contínua permite operar até o dobro da velocidade nominal.
Consequentemente, o motor da série não deve ser usado nos discos onde existe a possibilidade de que o torque de carga seja abandonado na medida em que a velocidade possa exceder o valor nominal duas vezes.
Motor composto:
As características da velocidade da torca e a cruz de cortiça de um motor composto cumulativo também estão representadas na Figura 5.3. A velocidade sem carga depende da força do campo de derivação e da inclinação da característica na força do campo da série.
Os motores compostos cumulativos são usados em aplicações em que é necessária uma característica caída semelhante à de uma série em série e, ao mesmo tempo, a velocidade de carga deve ser limitada a uma aposta segura; Exemplos típicos são elevadores e vencedores.
Também é usado em aplicativos de carga intermitente, onde a carga varia de quase nenhuma carga para cargas muito pesadas. Nessas aplicações, um volante pode ser montado no eixo do motor para a equalização da carga.
Além da carga de equalização na fonte de alimentação, permite o uso de um motor menor. A máquina de prensa é um exemplo típico desse tipo de aplicativo.
As características da Fig. 5.3, obtidas na tensão terminal nominal e em campo completo, são conhecidas como características naturais da velocidade da fenda. A velocidade nominal (ou carga total) é conhecida como velocidade básica.
Motor universal:
O motor universal pode operar tanto em energia CC quanto CA. É essencialmente um motor da série DC, com algumas diferenças de construção; que são introduzidos principalmente para obter desempenho satisfatório no AC. No motor em série, o torque depende do produto da corrente da estrutura e do fluxo de campo.
A inversão da tensão do terminal inverso tanto o reforço quanto o fluxo de campo. Portanto, o casal ficou na mesma direção. Portanto, quando nutrido de uma fonte de CA, o motor da série produz torque unidirecional.
Embora o torque flutua a uma frequência de 100 Hz entre zero e seu valor de crista, suas flutuações são suavizadas pela inércia do motor e o motor opera a uma velocidade uniforme.
Um motor simples da série DC não funciona bem no AC. Perdas de corrente de histerese e foucault que ocorrem em pólos de campo e gargalhadas reduzem a eficiência do motor e aumentam a carga térmica.
O fluxo alternado produz grandes correntes induzidas nas bobinas que são curtas pelos pincéis durante a comutação. Isso causa faísca excessiva no interruptor. O fator de potência do motor é muito medíocre devido a uma grande indutância do campo e do reforço.
O motor universal é construído especialmente para resolver essas limitações. Além do reforço, os postes de campo e os garfos também são enrolados para reduzir as perdas de corrente do Foucault. A estratificação de alta permeabilidade no aço de silício é usada para reduzir a perda de histerese.
Um enrolamento compensatório é usado em série com o reforço para reduzir a indutância do reforço. A indutância do campo é abaixada usando menos torres e pedaços de pólo raso. Apesar dessas mudanças, quando abastecida pelo CA, a comutação é pior do que quando o DC é alimentado.
Portanto, suas classificações de poder raramente são maiores que 1 kW. Nenhuma velocidade de carga é aumentada, mas geralmente não é alta o suficiente para danificar o motor.
A maioria dos motores universais é feita para uso em velocidades superiores a 3000 rpm. Esta é a velocidade máxima de um motor de indução quando fornecida de uma fonte de alimentação de 50 Hz. Abaixo dessa velocidade, o mecanismo de indução é geralmente preferido.
Muitos motores universais operam em velocidades de até 12.000 rpm e podem chegar a 20.000 rpm. Devido a altas velocidades de operação, o motor universal é muito menor do que para uma indução ou um motor CC de baixa velocidade de uma notação idêntica.
Devido aos pincéis e à chave, ele requer manutenção frequente e tem um tempo de operação relativamente curto.
Até recentemente, o motor universal era o motor mais barato capaz de correr em alta velocidade e ter um peso e tamanho relativamente muito baixo.
Tipos sem motor de corrente contínua ou um mecanismo de indução de fase única alimentada por um inversor de frequência variável pode se tornar seu concorrente em um futuro próximo.
Algumas aplicações universais de motor são fãs, exercícios elétricos, eletrodomésticos, etc.
Motores de amor permanentes:
Nos motores de corrente contínua do ímã permanente, a emoção no solo é obtida por ímãs permanentes aumentando adequadamente no estator. São utilizados os ímãs de ferritas ou terras raras (samário de cobalto). As ferritas são comumente usadas devido ao menor custo, mas a máquina se torna volumosa devido à menor inquietação.
As terras raras devido à sua alta descanso permitem uma grande redução de peso e tamanho, mas são muito caros. Os motores de amor permanentes são usados principalmente na gama de poderes fracionários, mas estão disponíveis até 5 kW.
O uso de ímãs permanentes para excitação elimina a perda de cobre no campo e a necessidade de propostas no campo. Comparados aos motores das feridas no campo, elas são mais eficazes, confiáveis, robustas e compactas.
O fluxo de campo permanece constante para todas as cargas, oferecendo uma característica de torque de velocidade mais linear. Em um motor excitado separadamente, a falha da comida no solo pode levar a um estado de fuga. Isso não acontece em motores de amor permanentes.
Como o fluxo é constante nesses motores, a velocidade não pode ser controlada acima da velocidade básica. Esses motores têm aplicações em veículos elétricos, como ciclomotores, carrinhos de levantamento, cadeiras de rodas, etc.
DC Servo Motors:
Não existe uma linha de compartilhamento clara entre o servo e a lesão convencional no campo e os motores DC permanentes amorosos.
Os servomotores devem ser usados em sistemas de velocidade e controle de posição fechados, onde os requisitos de desempenho são tais que não podem ser obtidos por um mecanismo de corrente direta normal. Um tipo normal de motor CC foi projetado para obter um bom desempenho de carga total com um custo mínimo.
Ele não fornece uma boa resposta dinâmica e esclarecimento permanente quando usado em um jogador de loop fechado. O servomotor, por outro lado, foi projetado para obter um bom desempenho dinâmico e precisão permanente do regime.
Ele foi projetado para obter o mesmo desempenho nas duas direções de rotação, uma alta proporção de torque / inércia, baixo atrito e um torque sem ondulação suave. Em um tipo de motor de corrente contínua, a inércia da estrutura é proporcional ao comprimento e ao diâmetro do quadrado.
Em alguns servomotores, a inércia é reduzida reduzindo o diâmetro e aumentando o comprimento da mesma nota. Em recursos de baixa potência, onde o controle de corrente não é incorporado, a corrente durante a operação transitória pode ser ainda superior a dez vezes a corrente nominal.
O interruptor foi projetado para obter uma comutação sem faísca, mesmo em correntes tão importantes, o que não será possível em um motor de corrente comum. Devido a esses requisitos exigentes, os servomotores são muito mais caros que os motores CC atuais.
Suas anotações podem ser alguns watts (em servos de instrumentos) em Megha Watts (rolos de aço). Pequenos servomotores são geralmente do tipo ímã permanente.
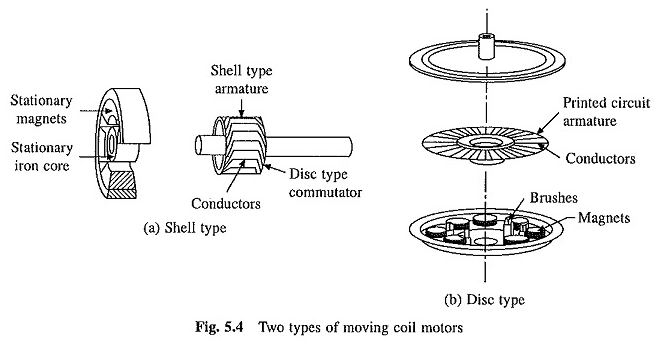
Motores de bobina em movimento:
Algumas aplicações requerem aceleração muito maior do que pode ser feita em um servomotor convencional de CC. Os reforços dos motores de corrente contínua das bobinas móveis têm construções especiais que permitem uma redução substancial na inércia de rosa e indutância, permitindo acelerações muito altas. Dois tipos de motores de bobina em movimento são o tipo de concha e disco.
Tipo de shell:
Para maximizar a aceleração, o reforço de inércia deve ser minimizado.
Em um motor CC convencional, o reforço consiste em um enrolamento alojado em slots fornecidos em um ciclinder de material magnético, que é planejado principalmente para dar um caminho de baixa relutância para o campo do estator e corre com o enrolamento do reforço. Portanto, o reforço tem alta inércia.
Em um mecanismo de bobina móvel do tipo Shell (Fig. 5.4 (a)), o rotor consiste apenas em um enrolamento de reforço. Portanto, tem inércia muito baixa. Um caminho de baixa relutância para o campo do estator é fornecido por um cilindro de material magnético estacionário.
O enrolamento de reforço consiste em condutores montados para formar um cilindro de parede fino. O interruptor pode ter construção cilíndrica, como nos motores CC convencionais ou na construção de tipos de disco.
Os motores minúsculos (com diâmetros em torno de 1 cm), chamados micromotores, têm um rolo de reforço composto por fios simplesmente envernizados dispostos em forma cilíndrica e uma chave do tipo disco. Esses motores são amplamente utilizados em câmeras, jogadores de cartão, sistemas de vídeo etc.
Em motores maiores, o reforço do reforço é feito unindo os condutores usando resinas de polímero e fibra de vidro para fornecer resistência mecânica adequada.
Tipo de disco ou panquecas:
Os detalhes da construção são ilustrados na Figura 5.4 (b). O reforço é feito na forma de um disco ou panquecas, e os motoristas de quadros se assemelham aos raios em uma roda.
O rolo de reforço é formado, poliram os drivers de uma folha de cobre, soldando -os e colocando -os em um disco leve. Os segmentos do motorista são então conectados a uma mudança no centro do disco.
Observe que a direção do fluxo é axial e que a corrente de reforço é radial. Isso se opõe apenas aos motores do tipo Shell (ou convencional), onde a corrente é axial e o fluxo é radial. O princípio operacional é o mesmo que o de um mecanismo de corrente direta convencional.
Os mecanismos de bobina móvel de disco são mais robustos e estão disponíveis em tamanho até alguns quilowatts. Eles encontram aplicativos onde o espaço axial está em um bônus como máquinas -ferramentas, discos, etc.
Os motores movidos a bobina podem ser fornecidos com um grande número de motoristas (algumas centenas). Portanto, o casal permanece quase constante quando o rotor gira. Isso lhes permite produzir uma rotação muito fluida em baixa velocidade.
A ausência de ferro de reforço do mecanismo do tipo de disco elimina as perdas associadas ao núcleo, o que o torna mais eficaz do que os motores CC convencionais. Como já indicado, a baixa inércia e a baixa indutância de reinicialização fornecem aos motores de bobina móvel uma excelente resposta dinâmica.
Motores de casal:
Os motores CC projetados para operar por longos períodos em uma condição em uma parada ou em baixa velocidade são chamados de motores de torque. Um tipo de motor CC normal foi projetado para otimizar o desempenho a toda velocidade.
Em pequenas notas, a corrente bloqueada ou de baixa velocidade nos motores normais de CC pode ser de 5 a 10 vezes a corrente nominal. Se esses motores puderem operar em baixa velocidade (ou parada), o enrolamento do quadro será queimado por superaquecimento e o interruptor será danificado devido a um peso.
No caso de motores de torque, devido ao design especial, a corrente bloqueada e de baixa velocidade permanece abaixo da aposta segura. Alguns motores de torque são projetados para operar em baixa velocidade por intermitência.
As aplicações dos motores de torque podem ser divididas em três categorias:
- Onde o motor deve operar no estado parado. Aqui, o objetivo do motor é desenvolver uma tensão ou pressão necessária em um material, semelhante à mola. Máquinas-ferramentas, o Splio faz parte desta categoria.
- Na segunda categoria, o motor de torque é necessário para se mover em apenas algumas revoluções ou graus de revolução. A abertura de válvulas, interruptores e dispositivos de aperto são alguns exemplos.
- Esta categoria de aplicativo implica um movimento contínuo do motor em baixa velocidade, por exemplo, o leitor da bobina.