Motor CC Drives sem vassouras (PMAC trapezoidal):
A seção transversal de um motor CC com 2 2 polos com 2 polos é representada na Figura 7.15. Ele tem um rotor amoroso permanente com um arco de polo largo. O estator possui três enrolamentos de fase concentrados, que são movidos em 120 ° e cada enrolamento de fase se estende acima de 60 ° de cada lado.
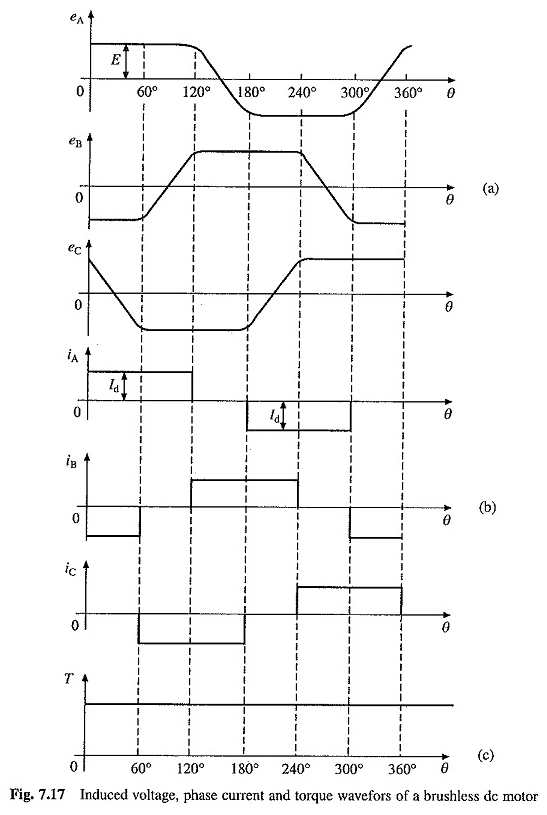
As tensões induzidas em três fases são representadas na Figura 7.17 (a). A razão para obter formas de ondas trapezoidais agora pode ser explicada. Quando você vira a direção no sentido anti -horaroso, até 120 ° de rotação da posição ilustrada na FIG.
7.15, todos os drivers superiores da fase vincularão o Pólo Sul e todos os drivers inferiores da fase para vincular o Pólo Norte. Consequentemente, a tensão induzida na fase A será a mesma durante a rotação de 120 ° (Fig. 7.17 (a).

Além de 120 °, alguns motoristas no pólo norte do link superior e outros do Pólo Sul. O mesmo acontece com os motoristas inferiores. Consequentemente, a tensão induzida na fase tem linear linear na rotação dos 60 ° seguintes. O restante da forma de onda da Fase A e dos Wavelems das fases B e C pode ser explicado da mesma maneira.


Um motor PMAC trapezoidal nutrido em um inversor operando no modo autocontrolado é chamado de motor CC sem escovas.

Motor DC sem vassouras para aplicações servo:
Um breve motor DC livre usando um inversor de fonte de tensão (VSI) e um motor PMAC trapezoidal é ilustrado na Figura 7.16 (a).
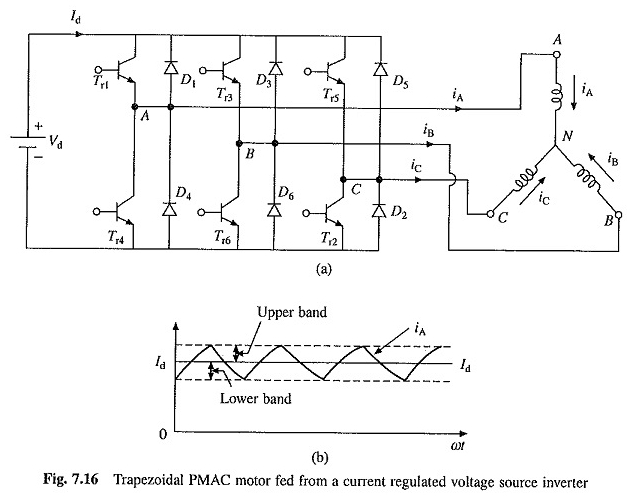
Os enrolamentos do estator estão conectados às estrelas. Ele terá sensores de posição do rotor, que não são ilustrados na figura. As ondas de onda de tensão de fase para um motor PMAC trapezoidal estão representadas na Figura 7.17 (a). Que os enrolamentos do estator sejam alimentados com impulsos atuais representados na Figura 7.17 (b).
Os impulsos atuais são de 120 ° e estão localizados na região onde a tensão induzida é constante e máxima. Além disso, a polaridade dos pulsos de corrente é a mesma da tensão induzida. Como o fluxo de gap de ar é constante, a tensão induzida é proporcional à velocidade do rotor.
![]()
Durante cada intervalo de 60 ° na Figura 7.17, a corrente entre uma fase e sai de outra fase; portanto, a fonte de alimentação ao motor em cada um desses intervalos ![]()
Torque desenvolvido pelo motor

A forma de onda do casal é dada na Figura 7.17 (c). De acordo com a Eq. (7.31) O casal é proporcional ao ID atual. Você pode exibir que um ID de corrente CC circula no link CC. A operação de frenagem regenerativa é obtida pela reversão de correntes de fase.
Isso também reverterá o ID atual da fonte. Agora, a energia vai da máquina para o inversor e o inversor na fonte DC. Quando a velocidade é revertida, a polaridade das tensões induzidas é revertida. Com a polaridade atual ilustrada na FIG.
7.17, o leitor fornece uma operação de frenagem regenerativa e, quando a direção atual é revertida, a operação do automóvel é obtida. As formas de onda de corrente mostradas na Figura 7.17 (b) são produzidas da seguinte forma.
Durante o período 0∘ a 60∘, IA = ID e IB = –id. A IA atual entre a fase A e a participação na fase B. Quando os transistores TR1 e TR6 estão, os terminais A e B estão relacionados aos terminais positivos e negativos da fonte CC, respectivamente.
Uma corrente circulará pelo caminho composto por VD, TR1, Fase A, Fase B e TR6 e a taxa de mudança atual IA será positiva. Quando TR1 e TR6 são desativados, essa corrente circula através de um caminho composto pela Fase A, Fase B, Diodo D3, VD e Diodo D4.
Como a corrente deve circular contra a tensão da VD, a taxa de variação da IA será negativa. Assim, ao ativar e extinguir a fase TR1 e TR6 alternadamente, a corrente A pode ser feita para seguir o ID da corrente de referência em uma banda de histerese, como mostra a Figura 7.16 (b). Ao reduzir a banda o suficiente, quase uma corrente CC do valor desejada pode ser produzida.
A operação para outros intervalos de 60 ° pode ser explicada da mesma maneira. Para colocar adequadamente os pulsos de potência em comparação com as tensões induzidas ou a identificação desses sessenta intervalos, os sinais são gerados pelos sensores de posição do rotor.
Nas seis posições angulares do rotor, devem ser detectadas pelo ciclo da tensão induzida. Os sensores de efeito de salão podem detectar a magnitude e a direção de um campo magnético. Portanto, três efeitos da sala podem detectar as seis posições do rotor.
Os sensores são montados no intervalo elétrico de 60 ° e alinhados adequadamente com o enrolamento do estator. Sensores ópticos também estão disponíveis. Os sensores usados com o motor PMAC trapezoidal são mais baratos em comparação com os necessários com o motor PMAC sinusóide.
Como o motor trapezoidal também é mais barato, o leitor tem um custo muito menor. Embora a resposta dinâmica seja comparável, as ondulações de torque são consideravelmente mais altas neste leitor.
A ondulação do torque é causada devido à tensão induzida de que a tensão não é exatamente trapezoidal e a incapacidade dos inversores de produzir ondas de onda de corrente retangulares.
O player trapezoidal do PMAC é amplamente utilizado no treinamento de servo, exceto em discos de alto desempenho, onde o jogador do motor sinusoidal do PMAC é preferido.
Há um grande número de semelhanças entre o motor PMAC trapezoidal alimentado com o inversor e um motor CC. Como motor de corrente contínua, a tensão induzida é proporcional à velocidade [Eq. (7.30)], o torque é proporcional à corrente de reforço [Eq.
(7.31)] e os campos do estator e do rotor permanecem estacionários em comparação entre si. No entanto, ele não possui pincéis e desvantagens associados; portanto, o motor PMAC trapezoidal alimentado com o inversor é comumente conhecido como motor CC de vassoura.
Este motor também foi projetado como um motor CC comutado eletronicamente, porque o inversor cumpre a mesma função aqui que os pincéis e o interruptor em um motor DC, ou seja,
Para mover as correntes entre os drivers da estrutura para manter o estator e os campos do rotor estacionário (e em quadratura) em comparação entre si.
Motor CC Drives sem vassouras baixas:
Um dos pontos importantes relativos aos leitores de mecanismo CC, sem CC, é apenas pela integração do conversor / inversor com o motor, o leitor é consideravelmente simplificado, resultando em um controle mais simples e uma redução substancial no custo.
Enquanto as máquinas de três fases são usadas em aplicações majoritárias, também são usadas máquinas de fase única e quatro fases. Da mesma forma, é usada uma grande variedade de conversores / inversores.
Os motores são alimentados por pulsos de corrente e também por pulsos de tensão com um limite de corrente apenas para garantir que a corrente não exceda as dimensões do conversor e do motor. Dois desses leitores são descritos abaixo.

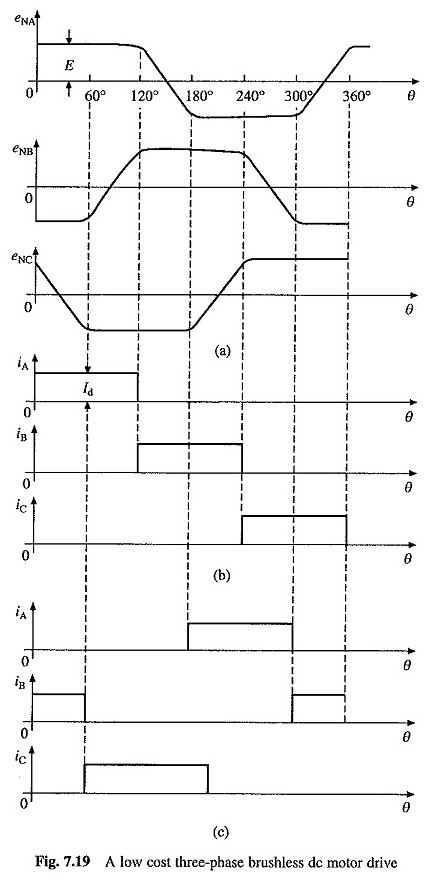
Uma unidade de baixo custo usando um motor PMAC trapezoidal de três fases é ilustrada na Figura 7.18. Ele usa apenas três transistores e três conversores de diodo, que só podem fornecer correntes ou tensões positivas com três fases de motor.
As tensões induzidas e a corrente prevista para operações de automobilização e frenagem estão representadas na Figura 7.19. Quando pulsos de potência positiva a 120 °, conforme indicado na Figura 7.19 (b), são fornecidos ao motor, a operação da direção é obtida na direção anti -horarsa.
Quando esses impulsos são compensados em 180 °, como mostrado na Figura 7.19 (c), a operação de frenagem é obtida. Operações de automobilização e frenagem para a rotação na direção do tempo são obtidas por sincronizando impulsos, conforme indicado na Figura 7.19 (c) e (b), respectivamente. Cada fase é fornecida principalmente por um helicóptero.
A corrente da fase Na é controlada por TR1 e D1. Quando o TR1 está na fonte, o VD é conectado através do enrolamento de Na e a taxa de variação da IA é positiva. Quando o TR1 é desativado, as rodas IA atuais através do diodo D1 e a taxa de variação da IA são negativas.
Assim, durante o período de 0 ° a 120 °, o TR1 pode ser ativado e desativado alternadamente, para que a corrente da IA seja feita para seguir uma corrente retangular de referência I * A em uma tira de histerese.
Comparado ao leitor na Figura 7.16, o torque produzido por este leitor para um determinado valor de ID será metade, dando uma resposta dinâmica mais lenta. O leitor também possui uma onda de torque mais alta.
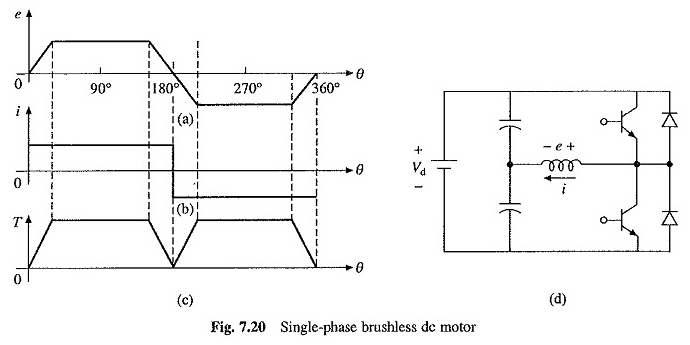
Vamos também examinar o treinamento de motor de corrente contínua unifase. Deixe o motor tem um polo largo é indicado na Figura 7.15 e um único enrolamento de fase concentrado com uma propagação de 60 ° de cada lado.
Seja θ medido a partir do momento em que o eixo da fase coincide com o eixo da postagem do rotor, então a tensão induzida no enrolamento de fase terá a forma da onda, como mostra a Figura 7.20. Ou o motor a ser fornecido a partir de um conversor monofásico de meio ponto ilustrado na FIG.
7.20 (d) com uma forma de onda de corrente retangular mostrada na Figura 7.20 (6). Em seguida, o torque produzido pelo motor terá uma forma de onda ilustrada na Figura 7.20 (c).
Embora o torque tenha uma ondulação grande, quando operar em alta velocidade, as ondulações de torque serão filtradas pela inércia do sistema de carga do motor, dando uma velocidade uniforme.
Características e aplicações importantes:
Devido à ausência de escovas e interruptores, o treinamento sem energia livre do motor tem várias vantagens em comparação com os motores CC convencionais.
Eles praticamente não precisam de manutenção, têm uma vida útil longa, alta confiabilidade, baixa inércia e atrito e baixa interferência e ruído de radiofrequência.
Devido à baixa inércia e atrito, eles têm aceleração mais rápida e podem ser executados em velocidades muito mais altas – até 100.000 rpm e são mais comuns. Como os enrolamentos de reforço estão no estator, o resfriamento é muito melhor, ou seja, pode ser obtido que passeios mais altos específicos podem ser obtidos.
Esses motores têm alta eficiência, excedendo 75%, enquanto os motores de campo de baixas classificações de potência têm muito menor eficiência. As desvantagens em comparação com os motores CC convencionais são um alto custo e um baixo torque de partida. O tamanho de um motor Balais CC é quase o mesmo que o motor CC convencional.
Os leitores de mecanismo CC CC encontram aplicativos nos leitores de tabela de tabela de registros de gravação, o leitor de banda para gravadores de vídeo, cuspires em discos rígidos para computadores e discos de baixo custo e baixa potência em periféricos de computador, instrumentos e sistemas de controle.
Eles também têm aplicações nos campos da aeroespacial, por exemplo, motores de giroscópio e refrigeradores criogênicos biomédicos e bombas cardíacas artificiais. Eles também são usados para dirigir ventiladores de resfriamento para circuitos eletrônicos e dissipadores de calor.