Motor de derivação DC com torque de velocidade:
A discussão anterior mostra que a variação na tensão do reforço fornece velocidades rastejantes. O método reostático simples fornece uma característica do motor de derivação DC do torque de velocidade com pouca dureza e pouca estabilidade.
O controle de Ward Leonard (variação suave da tensão), por outro lado, produz uma característica plana com dureza e estabilidade razoáveis, mas um alto custo inicial. Um método simples com um baixo custo inicial, para obter velocidades rastejantes com dureza suficiente, é representada na Figura 1.8.
O controle reostático convencional com resistência em série com o reforço é modificado disparando o reforço com baixa resistência. Ao variar os valores dos resistores de séries e derivados, as características refocadas na velocidade podem ser projetadas para ter a forma desejada.
No simples controle reostático usando apenas uma resistência em série, a tensão através do abrigo é de V. a velocidade de vácuo é decidida por V, qualquer que seja o valor de Rs. Se o reforço for desviado por RSH, a tensão através do quadro se tornará menor que V, mesmo sem carga.
A velocidade vazia diminui para o valor desejado com os valores apropriados de RS e RSH. Quanto menor o valor de RSH, mais a tensão é a tensão através do quadro sem carregar. Finalmente, a velocidade de não carga diminui. O valor RSH também é eficaz para tornar o prato característico.


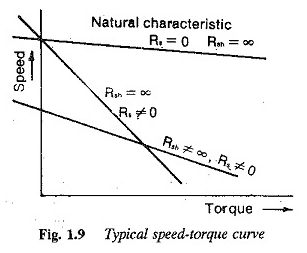
As características típicas da velocidade do filhote são representadas na Figura 1.9, na qual as características naturais do motor DC de shunt e a característica com um controle reostático simples são. Essa modificação pode ser usada se for necessária uma operação estável em baixa velocidade. Pode ser usado para a parada precisa do leitor. Ao modificar o valor do RSH, a velocidade pode ser reduzida a um valor muito baixo e a frenagem mecânica apropriada pode ser aplicada para ter uma parada específica. 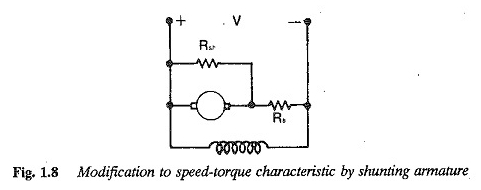
Referindo -se à Figura 1.8, temos 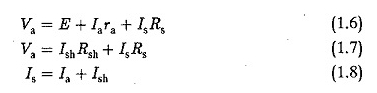
Ao usar essas equações, temos

Também das equações (1.8) e (1.7)

Usando esses relacionamentos na equação. (1.6) Nós temos

Substitua para / a em termos de TD, temos

A característica do topo da velocidade é representada na Figura 1.9. Os seguintes pontos são claros da figura:
1.A velocidade de carga (td = 0) diminui para 
como o valor de 
O valor RSH é menor, esse valor é menor. A inclinação também diminui se o RSH for pequeno. A dureza é assim melhorada e a operação estável é garantida em relação ao controle reostático simples.
2. O controle de velocidade suave depende de como RSH e RS são variados. O controle de velocidade fica surpreso porque os resistores podem variar em um marinheiro espalhado.
3. Cavagem abaixo da velocidade básica é possível. A velocidade vazia em si muda após as variações do RSH. Uma queda clara na velocidade vazia pode ser observada quando o RSH diminui. O controle de velocidade é obtido variando o valor de Rs.
O método é equivalente a tornar o campo mais forte e fornece resultados semelhantes aos obtidos aumentando a corrente do campo para uma determinada corrente de reforço.
4.O método é adequado para cargas de torque constantes, para que a corrente de reforço esteja no seu valor nominal.
5.O método é adequado se a parada precisa for
6. Não é econômico para operação contínua. As perdas de RSH e RS tornam o sistema ineficaz. O método pode ser usado se as velocidades estáveis da rampa forem necessárias por curtos períodos.