CC Motor Hız Kontrolü:
CC motor eğitim hızı aşağıdaki yöntemlerden biri olabilir:
- Takviye gerginliği kontrolü
- Saha Akışı Kontrolü
- Çerçeve Direnç Kontrolü
Bu hız kontrol yöntemleri için sürekli güç hız eğrilerinin hızı, Şekil 5.16 ila 5.18’de temsil edilmektedir.
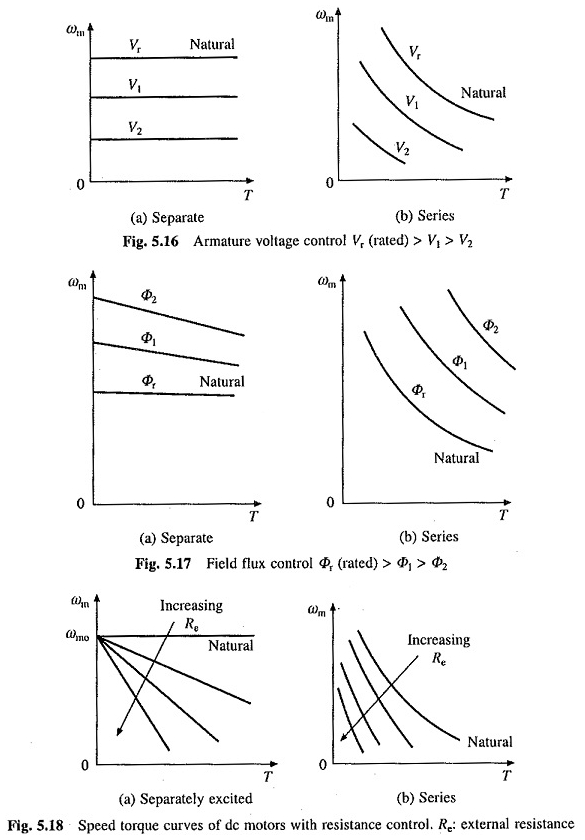

Büyük verimlilik, iyi geçiş tepkisi ve iyi hız düzenlemesi nedeniyle takviye gerginliğinin kontrolü tercih edilir. Ancak sürekli akım motor okuyucularının sadece temel hızın (nominal) altında bir hız kontrolünü sağlayabilir, çünkü olağandışı voltaj nominal değeri aşamaz. Temel hız üzerinde hız kontrolü için alan akışının kontrolü kullanılır.
Normal olarak tasarlanmış bir motorda, maksimum hız nominal hızın iki katına kadar izin verilebilir ve özel olarak tasarlanmış makinelerde, altı kez nominal bir hız olabilir.

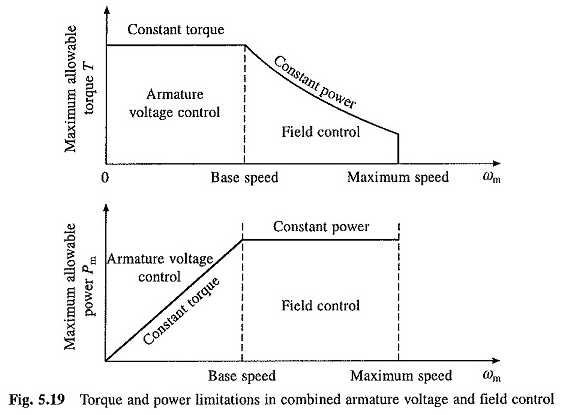
Bir takviye voltaj kontrolü ve nominal hızın altında tam bir alan ve nominal takviye voltajındaki akışın kontrolü nominal hızın üzerindeki tam bir alan ve nominal hızın üzerindeki tam bir alan, maksimum tork ve güç sınırlamaları Şekil 5.19’da temsil edilmektedir.

Bu nedenle, çerçevenin tam alandaki gerginliğinin kontrolünde, makinenin sağlayabileceği maksimum tork sabit bir değere sahiptir. Nominal takviye gerginliğindeki alanın kontrolünde, PM ∞ ia (çünkü E ≈ V = sabiti). Bu nedenle, motor tarafından geliştirilen maksimum gücün sabit bir değeri vardır.
Heyecanlı bir motorda ayrı ayrı, akış alanın sarısında değişken bir voltaj ile kontrol edilir ve seri olarak bir seride, ya alan sargısında değişken sayıda dönüşle veya sapmaya karşı bir dirençle alan sargısından bir direnç bağlayarak kontrol edilir.
Takviye direncinin kontrolünde, hız, çerçeve ile seri olarak bağlanan dış dirençlerde güç israfı ile değiştirilir.
Doğrudan mevcut motor oynatıcıların hızını kontrol etmek için etkisiz bir yöntem olduğundan, düşük hız işlemlerinin süresinin toplam yürütme süresinin sadece küçük bir kısmını oluşturduğu, örneğin çekişte aralıklı yük uygulamaları kullanılmıştır. Bununla birlikte, tüm bu uygulamalarda takviyenin gerginlik kontrolü ile değiştirildi.