DC Motor Türleri:
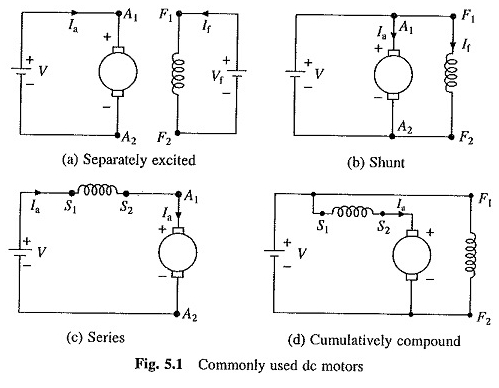
Yaygın olarak kullanılan akım motor tipleri Şekil 5.1’de temsil edilmektedir. Heyecanlı bir motorda ayrı ayrı, alan ve takviye gerilimleri birbirinden bağımsız olarak kontrol edilebilir. Bir şant motorunda, alan ve takviye ortak bir kaynağa bağlanır.
Dc motorlar – dc motor çeşitleri
Seride bir seri durumunda, alan akımı takviye akımı ile aynıdır ve bu nedenle saha akışı takviye akımına bağlıdır.
Kümülatif bir bileşik motorda, seri alanının manyeto-motive kuvveti takviye akımının bir fonksiyonudur ve şant alanının MMF’si ile aynı yöndedir.
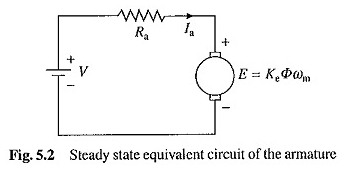
Bir CC makinesinin çerçevesinin denge durumuna eşdeğer devre, Şekil 5.2’de gösterilmiştir. RA direnci, takviye devresinin direncidir.
Ayrı ayrı uyarılmış ve şant motorları için, takviyenin takviyesinin ve seri ve bileşiklerdeki motorlar için, çerçevenin ve alanın sarma direncinin toplamıdır. Her tür CC motoru için geçerli olan temel denklemler

Veya
Φ – Pole, Webers akışıdır;
İa – takviye akımı, a;
V – R -Rip’in gerginliği;
RA – Olağandışı devrenin direnci, ohm;
Ωm – Takviye hızı, rad / kuru;
T – motor tarafından geliştirilen tork, nm; Ve
Ke – motor sabiti.
Denklemin. (5.1) ila (5.3) 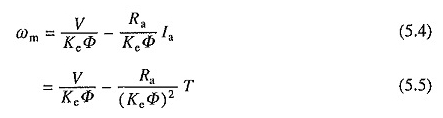
Shutors ve ayrı ayrı heyecanlı:
Şant ve heyecanlı motorlar ayrı ayrı, sabit bir alan akımı ile akışın sabit olduğu varsayılabilir. Ayrılmak
![]()
Sonra denklemlerden. (5.1), (5.3) ve (5.4) ila (5.6)

Terminal voltajı ve tam alan için heyecanlı bir motorun hız ve mantar-crushes özellikleri Şekil 5.3’te temsil edilmektedir. Torca hız eğrisi düz bir çizgidir.
Yük serbest yükleme hızı ωm0, takviye ve alan uyarımı alanları tarafından belirlenir. Tork arttıkça hız azalır ve hız düzenlemesi takviye devresinin direncine bağlıdır (Denk. (5.10)). Orta boy bir motor durumunda, tam yükün hızında olağan düşüş,

yaklaşık%5. Heyecanlı motorlar ayrı ayrı iyi hız düzenlemeleri ve ayarlanabilir hız gerektiren uygulamalarda kullanılır.
Seri Motor:
Seri motorlarda, akış takviye akımına bağlıdır. Doymamış mıknatıslanma karakteristik bölgesinde, φ AI ile orantılı olabilir. Bu yüzden,
![]()
Denklemlerde ikame. (5.3), (5.4) ve (5.5)
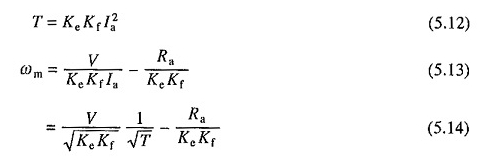
RA takviyesinin devresine karşı direnç artık takviye ve alanın sarma dirençlerinin toplamıdır. Nominal ve tam alan voltajında bir seri motorun Torca ve Corque-Current özellikleri Şekil 5.3’te temsil edilmektedir.
Serinin motorları, yüksek başlangıç torku ve ağır tork aşırı yükleri gerektiren uygulamalar için uygundur.
Torkun, kareye takviye akımı ile orantılı olduğu göz önüne alındığında, torktaki aynı artış için, motor akımındaki artış, torkun takviye ile orantılı olduğu heyecanlı bir motorla karşılaştırıldığında daha azdır.
Böylece, ağır tork aşırı yükleri ve başlangıç sırasında, kaynağa aşırı güç yükü ve motorun termal yükü makul değerlerle sınırlı tutulur. Denk. (5.14), hız, torkun kare kökü gibi ters olarak değiştiğinden, makine hafif yükle yüksek hızda çalışır.
Genel olarak, bir tür sürekli akım motorunun mekanik direnci, nominal hızın yaklaşık iki katına kadar çalışmasını sağlar.
Sonuç olarak, serinin motoru, hızın nominal değeri iki kez aşabileceği sürece yük torkunun terk edilmesi olasılığının olduğu disklerde kullanılmamalıdır.
Bileşik Motor:
Torca hızının özellikleri ve kümülatif bir bileşik motorun mantar-cross-Cross-Cross-Cross, Şekil 5.3’te de temsil edilmektedir. Yüksüz hız, şant alanının mukavemetine ve karakteristik seri alanının gücüne bağlıdır.
Kümülatif bileşik motorlar, serideki bir serinin gerekli olduğu bir sarkma özelliğinin gerekli olduğu uygulamalarda kullanılır ve aynı zamanda yük hızının güvenli bir bahisle sınırlı olması gerekir; Tipik örnekler asansörler ve kazananlardır.
Ayrıca, yükün neredeyse hiç yükten çok ağır yüklere kadar değiştiği aralıklı yük uygulamalarında da kullanılır. Bu uygulamalarda, yükün eşitlenmesi için motor şaftına bir direksiyon simidi monte edilebilir.
Güç kaynağındaki eşitleme yükünün yanı sıra, daha küçük bir motorun kullanılmasına izin verir. Pres makinesi, bu tür uygulamaların tipik bir örneğidir.
Nominal terminal voltajında ve tam alanda elde edilen Şekil 5.3’ün özellikleri, yarık hızının doğal özellikleri olarak bilinir. Nominal hız (veya tam yük) temel hız olarak bilinir.
Evrensel Motor:
Evrensel motor hem DC hem de AC güç üzerinde çalışabilir. Esasen bazı inşaat farklılıkları olan DC serisinin bir motorudur; esas olarak AC’de tatmin edici bir performans elde etmek için tanıtılır. Serideki motorda tork, çerçeve akımının ve alan akışının ürününe bağlıdır.
Ters terminal voltajının ters çevrilmesi hem takviye hem de alan akışı. Bu nedenle, çift aynı yönde kaldı. Bu nedenle, bir CA kaynağından beslendiğinde, serinin motoru tek yönlü tork üretir.
Tork sıfır ve kret değeri arasında 100 Hz frekansta dalgalanmasına rağmen, dalgalanmalar motor ataleti tarafından düzeltilir ve motor düzgün bir hızda çalışır.
DC serisinin basit bir motoru AC’de iyi çalışmaz. Histerezis ve foucault saha direklerinde ve sarılarında meydana gelen akım kayıpları motor verimliliğini azaltır ve termal yükü arttırır.
Alternatif akış, anahtarlama sırasında fırçalar tarafından kısa olan bobinlerde indüklenen büyük akımlar üretir. Bu, anahtara aşırı kıvılcımlara neden olur. Motor güç faktörü, alanın büyük bir endüktansı ve takviye nedeniyle çok vasattır.
Evrensel motor, bu sınırlamaları çözmek için özel olarak üretilmiştir. Takviye ek olarak, saha direkleri ve yoklar da Foucault akım kayıplarını azaltmak için yuvarlanır. Histerezis kaybını azaltmak için silikon çeliğinde yüksek değerlendirilebilirlik tabakalaşması kullanılır.
Takviye ile takviye ile seri olarak telafi edici bir sargı kullanılır. Alanın endüktansı, daha az kule ve sığ kutup parçası kullanılarak düşürülür. Bu değişikliklere rağmen, AC tarafından beslendiğinde, anahtarlama DC’nin beslendiği zamandan daha kötüdür.
Bu nedenle, güç derecelendirmeleri nadiren 1 kW’dan daha fazladır. Yük hızı yükseltilmez, ancak genellikle motora zarar verecek kadar yüksek değildir.
Çoğu evrensel motor 3000 rpm’den büyük hızlarda kullanım için yapılır. Bu, 50 Hz güç kaynağından sağlandığında bir indüksiyon motorunun maksimum hızıdır. Bu hızın altında, indüksiyon motoru genellikle tercih edilir.
Birçok evrensel motor 12.000 rpm’ye kadar hızlarda çalışır ve 20.000 rpm’ye kadar çıkabilir. Yüksek çalışma hızları nedeniyle, evrensel motor bir indüksiyon veya aynı gösterime sahip düşük hızlı bir CC motorundan çok daha küçüktür.
Fırçalar ve anahtar nedeniyle, sık bakım gerektirir ve nispeten kısa çalışma süresine sahiptir.
Yakın zamana kadar, evrensel motor, yüksek hızda koşabilen ve nispeten çok düşük ağırlık ve boyuta sahip olabilen en ucuz motordu.
Değişken bir frekans inverter ile güçlendirilen sürekli akım motorsuz tipler veya tek bir faz indüksiyon motoru yakın gelecekte rakibi olabilir.
Bazı evrensel motor uygulamaları hayranlar, elektrik egzersizleri, ev aletleri vb.
Kalıcı sevgi dolu motorlar:
Kalıcı mıknatısın sürekli akım motorlarında, yerdeki heyecan stator üzerindeki uygun şekilde yükselen kalıcı mıknatıslarla elde edilir. Ferritlerin veya nadir toprakların (kobalt samaryum) mıknatısları kullanılır. Ferritler daha düşük maliyet nedeniyle yaygın olarak kullanılır, ancak makine en düşük resmenlik nedeniyle hantal hale gelir.
Yüksek direnişleri nedeniyle nadir topraklar, ağırlık ve boyutta büyük bir azalmaya izin verir, ancak çok pahalıdır. Kalıcı sevgi dolu motorlar esas olarak kesirli güçler aralığında kullanılır, ancak 5 kW’a kadar mevcuttur.
Heyecan için kalıcı mıknatısların kullanılması, alandaki bakır kaybını ve sahadaki ihalelere olan ihtiyacı ortadan kaldırır. Sahadaki yaraların motorlarıyla karşılaştırıldığında, daha etkili, güvenilir, sağlam ve kompakttır.
Alan akışı, daha doğrusal bir hız tork özelliği veren tüm yükler için sabit kalır. Heyecanlı bir motorda ayrı ayrı, yemeğin yerdeki başarısızlığı bir kaçış durumuna yol açabilir. Bu kalıcı sevgi dolu motorlarda gerçekleşmez.
Bu motorlarda akış sabit olduğundan, hız temel hızın üzerinde kontrol edilemez. Bu motorlarda mopedler, kaldırma arabaları, tekerlek sandalyeleri vb. Gibi elektrikli araçlarda uygulamaları vardır.
DC Servo Motorları:
Servo ile sahadaki geleneksel yaralanma ile kalıcı sevgi dolu DC motorları arasında net bir paylaşım çizgisi yoktur.
Servomotorlar, performans gereksinimlerinin normal bir doğrudan akım motoru tarafından elde edilemeyecek şekilde olduğu kapalı döngü hızında ve konum kontrol sistemlerinde kullanılması amaçlanmıştır. Normal bir CC motor tipi, minimum maliyetle iyi tam yük performansı elde etmek için tasarlanmıştır.
Kapalı bir döngü çalarda kullanıldığında iyi bir dinamik yanıt ve kalıcı açıklama sağlamaz. Servomotor ise iyi dinamik performans ve kalıcı rejim hassasiyeti elde etmek için tasarlanmıştır.
Her iki dönme yönünde, yüksek tork / atalet oranı, düşük sürtünme ve pürüzsüz dalgalanma olmayan bir torkta aynı performansı elde etmek için tasarlanmıştır. Bir tür sürekli akım motorunda, çerçeve ataleti kare uzunluğu ve çapı ile orantılıdır.
Bazı servootorlarda, çapı azaltarak ve aynı notun uzunluğunu artırarak atalet azalır. Akım kontrolünün dahil edilmediği düşük güç özelliklerinde, geçici çalışma sırasında akım nominal akımın on katından bile daha yüksek olabilir.
Anahtar, ortak bir akım motorunda mümkün olmayan önemli akımlarda bile kıvılcım olmadan bir anahtarlama elde etmek için tasarlanmıştır. Bu zorlu gereksinimler nedeniyle, servootorlar mevcut CC motorlardan çok daha pahalıdır.
Notları Megha Watts’ta (çelik silindirler) birkaç watt (enstrüman servolarında) olabilir. Küçük servootorlar genellikle kalıcı mıknatıs tipidir.
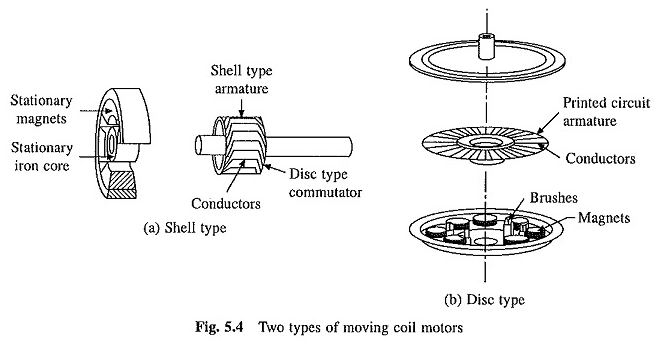
Hareketli Bobin Motorları:
Bazı uygulamalar, geleneksel bir CC servomotorunda yapılabilecekten çok daha yüksek ivme gerektirir. Mobil bobinlerin sürekli akım motorlarının takviyeleri, gül ve endüktans ataletinde önemli bir azalma sağlayan ve çok yüksek hızlanmalara izin veren özel yapılara sahiptir. İki tür hareketli bobin motoru kabuk ve disk tipidir.
Kabuk türü:
Hızlanmayı en üst düzeye çıkarmak için atalet takviyesi en aza indirilmelidir.
Geleneksel bir CC motorunda, takviye, esas olarak stator alanı için düşük bir isteksizlik yolu vermeyi planlayan ve takviyenin sarılmasıyla çalışan bir manyetik malzeme siklati üzerinde sağlanan yuvalar halinde barındırılmış bir sargılardan oluşur. Bu nedenle, takviye yüksek atalete sahiptir.
Kabuk tipi bir mobil bobin motorunda (Şekil 5.4 (a)), rotor sadece bir takviye sargısından oluşur. Bu nedenle, çok düşük atalete sahiptir. Stator alanı için düşük bir isteksizlik yolu, sabit manyetik malzeme silindiri tarafından sağlanır.
Takviye sargısı, ince bir duvar silindiri oluşturmak için monte edilmiş iletkenlerden oluşur. Anahtar, geleneksel CC motorlarında veya disk tiplerinin yapısında olduğu gibi silindirik yapıya sahip olabilir.
Mikromotorlar olarak adlandırılan küçük motorlar (çapları 1 cm civarında), silindirik formda düzenlenmiş basitçe verniklenmiş tellerden ve bir disk tipi anahtarından oluşan bir takviye silindirine sahiptir. Bu motorlar kameralarda, kart oyuncularında, video sistemlerinde vb.
Daha büyük motorlarda, takviyenin takviyesi, yeterli mekanik direnç sağlamak için polimer ve fiberglas reçineler kullanılarak iletkenlerin birbirine bağlanmasıyla yapılır.
Disk veya krep türü:
Yapının detayları Şekil 5.4 (b) ‘de gösterilmiştir. Takviye bir disk veya krep şeklinde yapılır ve çerçeve sürücüleri bir tekerlek üzerindeki ışınlara benzemektedir.
Takviye silindiri oluşur, sürücüleri bir bakır sayfadan tamponladı, bunları bir araya getirdi ve hafif bir diske yerleştirdi. Sürücünün segmentleri daha sonra diskin merkezine bir geçişe tutturulur.
Akışın yönünün eksenel olduğunu ve takviye akımının radyal olduğunu unutmayın. Bu, akımın eksenel olduğu ve akışın radyal olduğu kabuk tipi motorlara (veya geleneksel) karşıdır. Çalışma prensibi, geleneksel bir doğrudan akım motoruyla aynıdır.
Disk mobil bobin motorları daha sağlamdır ve birkaç kilowatt’a kadar mevcuttur. Eksenel boşluğun takım tezgahları, diskler vb. Gibi bir bonus olduğu uygulamalar bulurlar.
Hareketli bobin motorları çok sayıda sürücü (birkaç yüz) ile birlikte verilebilir. Bu nedenle, rotor döndükçe çift neredeyse sabit kalır. Bu, düşük hızda çok akışkan bir rotasyon üretmelerini sağlar.
Disk tipi motorun takviye demirinin olmaması, ilişkili çekirdek kayıplarını ortadan kaldırır, bu da onu geleneksel CC motorlardan daha etkili hale getirir. Daha önce belirtildiği gibi, düşük atalet ve düşük takviye endüktansı, hareketli bobin motorlarına mükemmel bir dinamik yanıt verir.
Çift motorlar:
Uzun süreler boyunca durma veya düşük hızda bir durumda çalışacak şekilde tasarlanmış CC motorlara tork motorları denir. Performansı tam hızda optimize etmek için normal bir CC motor tipi tasarlanmıştır.
Küçük notlarda, normal CC motorlarındaki bloke veya düşük hız akımı nominal akımın 5 ila 10 katı olabilir. Bu motorların düşük hızda çalışmasına izin verilirse (veya durdurulursa), çerçevenin sarılması aşırı ısınarak yakılır ve anahtar ağırlık nedeniyle hasar görür.
Tork motorları durumunda, özel tasarım nedeniyle, bloke edilmiş ve düşük hızlı akım güvenli baharın altında kalır. Bazı tork motorları aralıklarla düşük hızda çalışacak şekilde tasarlanmıştır.
Tork motorlarının uygulamaları üç kategoriye ayrılabilir:
- Motorun duruş sırasında eyalette çalışması gerektiği yer. Burada, motorun amacı, bir malzemede, yaya benzer bir voltaj veya basınç geliştirmektir. Makine aletleri, splio bu kategorinin bir parçasıdır.
- İkinci kategoride, tork motoru sadece birkaç devir veya devrim derecesinde hareket etmek için gereklidir. Vanaların, anahtarların ve sıkılaştırma cihazlarının açılması bazı örneklerdir.
- Bu uygulama kategorisi, motorun düşük hızda, örneğin bobin okuyucusu gibi sürekli bir hareketini ima eder.