CC motorunun tam kontrollü tek faz doğrultucuunun kontrolü:
CC motorunun tam kontrollü tek -faz doğrultucuunun kontrolü, Şekil 5.26 (a) ‘da gösterilmiştir. Motor eşdeğer devresi ile gösterilir. Saha yiyecekleri görüntülenmez. Alanın kontrolü gerektiğinde, tarla kontrolsüz bir doğrultucudan değilse, kontrollü bir doğrultucudan güçlendirilir. Giriş voltajı

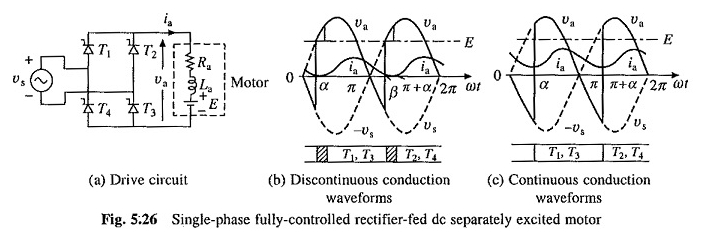

Bir kaynak voltaj döngüsünde, T1 ve T3 tristörleri α’dan π’dan kapı sinyallerini alır ve T2 ve T4 thyristors (π + α) kapı sinyallerini 2π alır. Takviye akımı sürekli olarak akmadığında, motor süreksiz bir iletimde çalışır.
Akım sürekli dolaştığında, iletim sürekli olacaktır. Okuyucu dikkate alındığında, esas olarak süreksiz bir iletimde çalışır. Süreksiz iletimin birkaç işletim moduna sahiptir.

Yaklaşık, ancak basit analiz yöntemi, yalnızca baskın süreksiz iletim modu dikkate alındığında elde edilir.

Motor terminalinin voltajı ve süreksiz iletim ve baskın sürekli iletim modları için mevcut dalga dalgaları Şek. 5.26 (b) ve (c).
Kontrollü doğrultucu tam kontrollü tek -fazının CC motorunun süreksiz iletim modunda, akım ωt = α’da T1 ve T3 tiristörlerinin uygulanmasıyla akmaya başlar. Motor kaynağa bağlanır ve terminal voltajı Vs.
İkisine akan akım, E ve ωt = π sonrası kaynak voltajı sıfırdan β’ye düşer. Mevcut T1 ve T3’ün deaktivasyonunun olmaması nedeniyle. Motor terminalinin voltajı artık indüklenen v voltajına eşittir. T2 ve T4 tiristörleri (π + α) ‘a çekildiğinde, motor terminalinin aşağıdaki döngüsü başlayacaktır.
Sürekli akım motorunun tam kontrollü tek faz doğrultucuunun sürekli iletim kontrol modunda, motordan pozitif bir akım dolaşır ve T2 ve T4, α’dan hemen önce iletimdir. Izgara darbelerinin uygulanması, ön T1 ve T3’teki önyargılı tristörler üzerinde etkinleştirilir.
T1 ve T3 T2 ve T4 ters önyargılarının iletimi bunları devre dışı bırakır. T2 ve T4 (π + α) ‘da aktive edildiğinde bir VA döngüsü tamamlanır ve T1 ve T3’in deaktivasyonuna neden olur.
Takviye akımı mükemmel DC olmadığından, motorun torku dalgalanır. Tork 100 Hz frekansta dalgalandığından, motor ataleti, neredeyse sabit bir hız ve bir dalgalanma e veren dalgalanmaları filtreleyebilir.
Dourctided İletim:
VA motor kontrol terminalinin voltajının tam kontrollü tek -faz doğrultucu kontrolünde, okuyucu iki aralıkta çalışır (Şekil 5.26 (b)):
- Motor kaynağa bağlandığında servis aralığı (α ≤ ωt ≤ β) ve va = v.
- IA = 0 ve Va = E.
Okuyucunun işleyişi aşağıdaki denklemlerle açıklanmaktadır: 
Denklem çözümü. (5.72), biri kaynak CA (VM / Z) sin (ωt – φ) ve diğerleri EMF ( – E / RA) nedeniyle iki bileşene sahiptir. Bu bileşenlerin her birinin bir geçiş bileşeni vardır. Ya bunlar tek bir katılımcı K1E-T / τA tarafından temsil edilir, sonra

Veya

ve τA Denk. (5.25).
K1 sabiti denklemin tabi tutulmasıyla değerlendirilebilir. (5.74) başlangıç durumunda IA (α) = 0. Denklemde elde edilen K1 değerini değiştirin. (5.74) işlenmiş

Denklemin IA (β) = 0’dan beri. (5.77)

β Denklemin yinelemeli çözümü ile değerlendirilebilir. (5.78).
Takviye akımının CC bileşeni nedeniyle takviyenin endüktansıyla gerginlik düşüşünden beri sıfırdır.
![]()
Voltajın ve takviye akımının DC bileşenleri sırasıyla nerede ve DC bileşenleri sırasıyla. Şekil 5.26’da (6)
Takviye akımı DC IA bileşeninden ve harmoniklerden oluşur. Akış sabit olduğunda, sadece CC bileşeni düzenli tork üretir. Harmonikler, ortalama değeri sıfır olan alternatif tork bileşenleri üretir. Bu nedenle, motor torku her zaman denklemle verilir. (5.7). Denklemler. (5.7), (5.8), (5.79) ve (5.80)

Β = π + α olduğunda sürekli ve süreksiz iletim arasındaki sınıra ulaşılır. Eq. (5.78), sürekli iletimi belirli bir α için süreksiz iletimden ayıran hız ωMC hızının kritik değerini verir.

Sürekli İletim:
Şekil 5.26 (c)

Denklemler. (5.7), (5.8), (5.79) ve

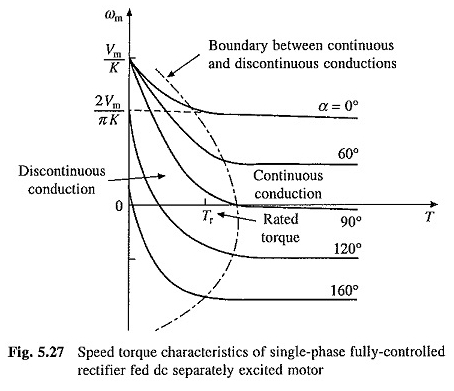
Okuyucu için hız tork eğrileri Şekil 5.27’de temsil edilmektedir. Yüksüz ideal çalışma IA = 0 olduğunda elde edilir. İki çift tiristör (T1, T3) ve (T2, T4) yönetmediğinde, IA sıfır olacaktır. Bu, yorgun dürtülerin bulunduğu dönem boyunca E> VS olduğunda olur.
Bu nedenle, α <π / 2 olduğunda, E VM'ye daha büyük veya eşit olmalı ve α> π / 2 olduğunda, E daha büyük veya VM sin ωt’ye eşit olmalıdır. Bu nedenle, yük hızı tarafından herhangi bir yük hızı verilmez.

Maksimum ortalama terminal voltajı (2vm / π) nominal motor voltajına eşit seçilir. Mükemmel bir doğrudan nominal değer voltajı ile güçlendirildiğinde ideal olmayan motor yük hızı (2vm / πk) olacaktır.
Doğrultucu kontrolü ile yüksüz maksimum hızın (π / 2) bu değerin katı olduğunu belirtmek ilginçtir. Sürekli ve süreksiz iletim arasındaki sınır noktalı çizgi ile temsil edilir (Şekil 5.27).
Derecelendirilen çiftler için, düşük sürücü esas olarak süreksiz bir iletimde çalışır. Sürekli iletimde, paralel düz çizgiler, (5.84) ‘e göre eğimi RA takviye devresine dirençine bağlı olan paralel çizgilerdir.
Süreksiz iletimin etkisi, hızın düzenlenmesini zayıf hale getirmektir. Bu davranış, Şekil 5.26 (b) ve (c) ‘nin dalgalanmalarından açıklanabilir. Sürekli iletimde, belirli bir α için, torktaki herhangi bir artış ωm ve E’yi düşürür, böylece AI ve T’nin artabilmesi için.
Ortalama terminal voltajı sabit kalacaktır. Süreksiz iletimde, çiftte herhangi bir artış ve AI ile birlikte artış β ve AV’de bir düşüşe yol açar. Bu nedenle, hız daha fazla miktarda düşer.
Okuyucu I (otomobil ileri) ve IV kadranlarında (ters rejeneratif fren) çalışır. Bu işlemler aşağıdaki gibi açıklanabilir:
Denklemin. (5.84), sürekli iletim hipotezi altında, doğrultucanın CC çıkış gerginliği, Şekil 5.28 (a) ‘da gösterildiği gibi α ile değişir. Çeyrek I’de çalıştığınızda, ωm pozitif ve α ≤ 90 °; Ve Va ve E’nin kutupları Şekil 5.28 (b) ‘de temsil edilmektedir.
Pozitif bir AI için bu, doğrultucuun enerji ve motoru tüketmesine yol açar, böylece bir otomobil ileri verir. E, AI ve çeyrek IV’in işleyişine giden polariteler Şekil 5.28 (c) ‘de temsil edilmektedir. E, ωm’nin tersine çevrilmesi nedeniyle tersine döndü.
AI her zaman aynı yönde olduğundan, makine bir fren torku üreten bir jeneratör olarak çalışır. Ayrıca α> 90 ° nedeniyle VA negatiftir, bu da doğrultucuun CC terminallerinin gücünü aldığını ve AC sektörüne aktardığını gösterir.
Bu doğrultucu işlemine tersine dönme denir ve doğrultucu bir invertör olarak çalışır. Üretilen arz bu işlemin kaynağında sağlandığından, rejeneratif bir frendir.

Okuyucunun kadranının iki işletim kapasitesi yalnızca revizyon yükleri veya motoru ters yöne sürükleyebilen diğer aktif yüklerle kullanılabilir.
Bir motorun iki çeyreği ile normal çalışırken, doğrudan bir sapa (çeyrek I) ve Şekil 5.26 (a) ‘da okuyucu tarafından sağlanamayan bir ön fren (çeyrek II) gereklidir.