DC serisindeki motor doğrultucuunun kontrolü:
DC serisi motorunun tek faz kontrol doğrultucuunun kontrolü çekişte kullanılır. DC serisi motorunun yarım kontrollü tek faz doğrultucu kontrolü, Şekil 5.37 (a) ‘da gösterilmiştir. Eşdeğer motor devresi de belirtilir.
Arka EMF takviye akımı ile azaldığından, süreksiz iletim sadece dar bir çalışma aralığında gerçekleşir. Bu nedenle, burada göz ardı edilecektir. VA, AI dalgalanmaları ve sürekli iletim için arkanın anında arkası Şekil 5.37 (b) ‘de temsil edilmektedir.
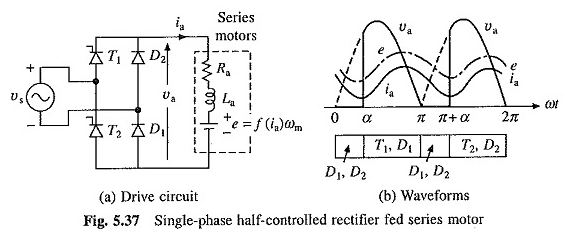
Denge durumunda, hız dalgalanmaları ihmal edilebilir olsa da, E sabit değildir, ancak AI ile dalgalanır. Belirli bir hız için E, doygunluk nedeniyle doğrusal olmayan motorun motorizasyon eğrisi ile AI ile bağlantılıdır. Bu yüzden


Motorun çalışması, sırasıyla hizmet ve serbest tekerlek aralıkları için aşağıdaki denklemlerle açıklanmaktadır.


F (ia) teriminin varlığı nedeniyle, Eqs. (5.103) ve (5.104) doğrusal olmayan diferansiyel denklemlerdir ve sadece dijital olarak çözülebilir. E, ortalama EA değeri ile değiştirildiğinde basit bir analiz yöntemi elde edilir, böylece

Veya
Endüktans yoluyla düşüşten bu yana, IA takviye akımının DC bileşeninden kaynaklanıyor sıfırdır.

Sürekli iletim için, yarım kontrollü ve tam kontrollü tek faz ayarlayıcılar denklemler tarafından verilir. (5.93) ve (5.83).
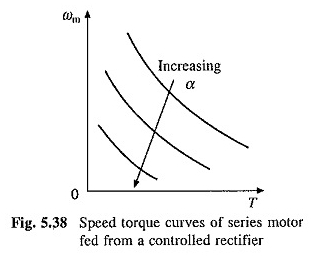
Sonraki adımlar dizisi, manyetik devrenin doğrusal olmayan hesabını alarak belirli bir α için civciv hızının karakteristikini hesaplamak için kullanılır: AI için bir değer seçilir. KA’nın karşılık gelen değeri, motorun motorizasyon karakteristiğinden elde edilir.
Bilinen α değeri için, hesaplama denklemden gider. (5.93) veya (5.83), kullanılan doğrultucu devresine bağlı olarak. Şimdi, ωm ve T, Denklemlerden elde edilir. (5.107) ve (5.108). Şekil 5.37 (a) ‘daki okuyucunun dişli hızı özelliklerinin doğası Şekil 5.38’de temsil edilmektedir.
Kesilmiş HP motor kontrolü:

Şekil 5.39 (a) ‘dan düşük maliyetli düşük maliyetli yarım maliyetli yarım maliyetli doğrultma nedeniyle, tek bir tristörün kullanımı, CC evrensel fraksiyonel HP, DC ve DC motorlarını kalıcı mıknatıslı kontrol etmek için kullanılır. Bu diskler el aletlerinde ve küçük yerli cihazlarda kullanılır.
Motor terminalinin voltajı ve takviye akım dalgası dalga dalgalanmaları Şekil 5.39 (b) ‘de temsil edilmektedir. Okuyucu, büyük bir sıfır akım aralığına ve önemli bir dalgalanmaya sahip süreksiz bir iletimdir.
Sonuç olarak, etkinlik kötüdür, hız düzenlemesi önemlidir ve atalet düşük olduğunda hız ortalama değeri etrafında dalgalanabilir. Bazen sıfır akım aralığının süresini azaltmak için bir serbest diyot eklenir.
Evrensel motorlar, Şekil 5.40 (a) ‘da gösterildiği gibi bir AC triyak gerginlik kontrolörü tarafından da kontrol edilebilir. TRIAC α ve (π + α) üzerine çizilir. Şimdi, makine takviyesi alternatif akımı taşır (Şekil 5.40 (b)).
Sıfır akım aralığının azalması nedeniyle, okuyucu ihmal edilebilir hız dalgalanmalarına ve daha düşük hız düzenlemesine sahiptir.