Dönüştürücüler aracılığıyla motor kontrolü ile iletişime geçin:
CC motor kontrolü, CA giriş voltajının kontrollü bir CC çıkışına dönüştürüldüğü kontrol fazı kontrol etmek için dönüştürücüler tarafından uygun ve verimli elde edilir.
Anahtarlama işlemi, akımın bir tristörden diğerine aktarılması, bu dönüştürücülerde ucuz doğal veya doğrusal anahtarlamadır. Gelen bir tristör aktive edildiğinden, giden tristörün tersini yapar ve onu söndürür.
Bu nedenle ek anahtarlama devresi gerekmez. Bu dönüştürücülerdeki güç dönüşüm verimliliği, tristörlerde nispeten düşük kayıplar nedeniyle% 95’ten büyüktür.
Bu dönüştürücüler, CC fraksiyonu-kW motorların hız kontrolünde ve ayrıca birkaç MW kadar önemli motor boyutlarına sahip silindirler için ters disklerde kullanılan büyük motorlarda kullanılır.
Bazı dönüştürücü türlerinde (yarı dönüştürücüler), serbest tekerlek diyotu olarak bilinen bir diyot, motorun endüktansında depolanan enerjinin dağıtılmasına izin vermek ve tristörler bloke edildiğinde motorun sürekliliğini sağlamak için motor terminallerine bağlanır. Ayrıca geçiş aşırı gerilimlere karşı koruma sağlar.

Tek yarım dalga dönüştürücü:
Şekil 11.14, uyarılmış bir CC motorunu ayrı ayrı kontrol etmek için tek fazlı bir yarım dalga dönüştürücü göstermektedir. Tek bir tristör ve serbest tekerlek diyotu gerektirir. Bu devrede, motor akımı her zaman süreksizdir, bu da kötü motor performansına neden olur.

Bu tür dönüştürücü sadece 400 W’den daha az motorlar için kullanılır. Burada ayrıntılı olarak açıklanmayacaktır; Bunlar, yarı dönüştürücü için dalga formlarının (voltaj ve akım) açıklamasından kolayca kaynaklanır.

Heyecanlı bir CC motoru ayrı ayrı tedarik eden yarı dönüştürücü:
CC terminallerinde bir voltaj ve bir polarite akımı veren bir kadranın dönüştürücüdür (Şekil 11.15a). Bu nedenle, rejeneratif frenleme sağlamaz, yani DC motorunun kontrolünün güç akışını AC gücüne sunar. Rejenerasyon gerekmediğinde, bu dönüştürücü ekonomi nedenleriyle kullanılır.

Şekil 11.15 (b), heyecanlı bir CC motor kontrolünü ayrı ayrı sağlayan bir yarı dönüştürücünün devrelerini vermektedir. RA takviye direnci ve endüktans, iç içe terminal gerilimi iken bir EMF EMF çerçeve tarafından indüklenirken seri olarak temsil edilir.
İki tristör, iki diyot ve serbest tekerlekli diyotu (motor terminallerinden bağlanır). Kalıcı işleyişte, takviye akımının tüm çalışma aralığında sürekli olduğu varsayılmaktadır.
Tipik kalıcı güç dalgası dalgaları Şekil 11.16’da temsil edilmektedir. Tiristör Th1, π + a açısında π + α açısında π + a açısında çizilir ve işlem sürekli olarak tekrarlanır.

Düzenli koşullar altında, Th1 çizildikçe (ωt = α), Th1 ve D2 borusu ve motor güç kaynağına, yani νa = ν’ya bağlanır. Ωt = π’da νa, giriş gerginliğinin polaritesi değiştikçe negatif olma eğilimindedir.
Bu, serbest tekerlek diyotu olan DFW’nin önyargılı hale geldiği ve Th1d2’den akan takviye akışının DFW’ye aktarıldığı anlamına gelir, yani Th1 anahtarı (doğal olarak).
Motor terminalleri, motorun güç kaynağından bağlantısı kesildiği bu dönemde takviye akımının sürekliliğini sağlar.
Ωt = π + α’da Th2 çizilir ve TH2D1 sürüşü, yani DFW’nin tersine çevrildiği ve dolayısıyla açık devrede. Motor bir kez daha sonraki π + α <ωt <2π periyodunun kaynağına bağlanır. Bu işlem sürekli olarak tekrarlanır.
Bir yarı dönüştürücü tarafından ayrı ayrı beslenen heyecanlı bir CC motor kontrolünün çeşitli voltaj ve akım dalga dalgası dalgası Şekil 11.16’da temsil edilmektedir. Her ne kadar motor terminalleri arasındaki voltaj olmasına rağmen (Şek.
11.16 (c)) kararlı bir CC değerinin ötesinde harmonikler içerir, burada motorun bu harmoniklere yanıt vermediği ve bu nedenle sabit hızda (n) ve sabit bir şekilde indüklenen FEM’de (EA) çalıştığı varsayılmaktadır. Th1 ωt = α çekerken, motor akımı tarafından verilir

Şekil 11.16 (a) ‘da gösterilen P noktasına kadar; ν> EA, böylece motor akımı artar. Aynı şey EMF EA motoru için de geçerli. Bu dönemde, yüke verilen enerjinin yanı sıra, enerji de motorun endüktansında (The) saklanır.
P noktasının ötesinde ν
Serbest tekerlek periyodu (π <ωt <π + α) sırasında, diyot endüktif gerginliğin tersine çevrilmesiyle önyargılı olmaya devam eder. Bu dönemde, mekanik yükü beslemek için motor endüktansında depolanan enerjinin bir kısmı tüketilir.
Motor akımı, hız ve FEM bu nedenle hepsi azalır. Bu işlem daha sonra Th2d1 ve daha sonra DFW yoluyla bir sonraki dönemde (π + α <ωt <2π + α) tekrarlanır. Şek.
11.16 (d), motor güç kaynağına bağlandığında, süreler (α, π), (π + α, 2π), … Diyotu serbest bir tekerlekte kullanmak gerekli değildir.
Ωt = π’da yokluğunda, D1, TH2 çekilinceye kadar serbest tekerlek TH1D1’den gerçekleşmeden önce bir şekilde önyargılı hale gelir. Ωt = 2π serbest tekerlek Th2d2 vb.
Şekil 11.16 (d) ‘den, sektörden çekilen akımın temelinin gerginliğe geç kaldığını φ1 (<α) açısından geç olduğunu gözlemlemek gerekir.
Dourcarded takviye akımı:
Takviye akımı, çekim açısının büyük değerleri, yüksek hız ve düşük tork değerleri için süreksiz hale gelir. Motor performansı süreksiz bir takviye akımı ile bozulur. Ortalama ve RMS’nin ortalama takviye akımına tepe oranı artar.
Bu nedenle motorun doğrudan akım modunda çalıştırılması arzu edilir. Bunu başarmak için, serbest tekerlek işlemi sırasında akımın azalma oranını azaltan harici takviye devresinin boğulması kullanılabilir.
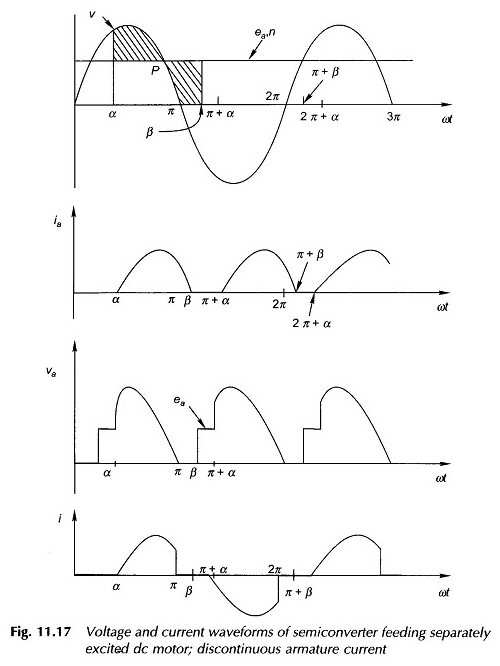
Süreksiz akımı olan yarı dönüştürücü için voltaj ve güç dalgası dalgalanmaları Şekil 11.17’de temsil edilmektedir. Motor, α <ωt <π dönemi için Th1d2 yoluyla güç kaynağına bağlanır. Π ötesinde, motor serbest bir tekerlekte diyot diyottan kısa devre.
Takviye akımı, β (yok olma açısı) π + α açısında sıfırda parçalanır, yani tiristör Th2 çizilmeden önce, böylece süreksiz takviye akımını yapar. Α ila π sırasında, Th1d2 yoluyla iletim süresi, motor terminal voltajı giriş voltajı ile aynıdır.
Π ila β sırasında, motor terminalinin voltajı sıfırdır, çünkü motor terminalleri serbest tekerlek diyotu tarafından kısa devre yapar. Β ila π + α, sahil motoru ve bu nedenle terminal voltajı EMF indüklesiyle aynıdır.
Uygun bir CC motoru tedarik eden tam dönüştürücü ayrı olarak:

Tam bir dönüştürücü, çıkışın gerilim polaritesinin tersine çevrilebileceği iki quadrant dönüştürücüdür (bkz. Şekil 11.18 (a)), ancak tek yönlü tiristörler nedeniyle akım tek yönlü kalır.
Tam bir dönüştürücü dört tristör kullanır, ancak serbest tekerlek diyotu gerekmez. Heyecanlı bir CC motor kontrolünü ayrı ayrı tedarik eden tam bir dönüştürücü Şekil 11.18’de gösterilmektedir. Voltaj ve akım dalga dalgaları Şek.
11.19 IA takviye akımının neredeyse sabit olduğu hipotezi ile. THYRISTORS Th1 Th3 kurşun α <ωt <π + α aralığı için ve motoru güç kaynağına bağlar. Π + a'da Th2th4 tiristörleri tetiklenir.
Hemen, besleme voltajı Th1 Th3 aracılığıyla zıt sapmada görünür ve bunları söndürür. Doğal veya çevrimiçi bir anahtarlamadır. Motor akımı Th1 Th3’ten Th2th4’e aktarılır.
Motorun güç kaynağından ayrıldığı bir süre olmadığından, serbest tekerlek gerekmez. Α ila π sırasında, enerji güç kaynağından motora akar (ν ve ben, tıpkı gitme ve IA gibi pozitiftir).
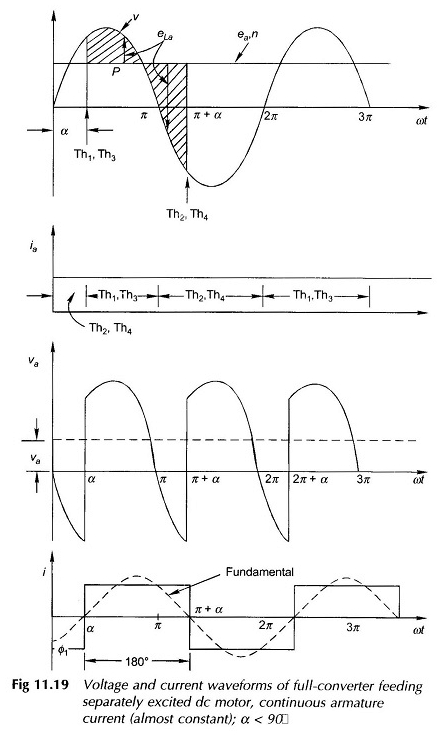
Bununla birlikte, π ila π + α sırasında, motorun motorunun bir kısmı güç kaynağına geri döner (V ve ben, tıpkı Va ve ia gibi, güç akışının tersine çevrilmesi anlamına gelir). Sektörden alınan akımın temelinin gerginliğin arkasında φ1 = α ile geciktiğini gözlemleyin.
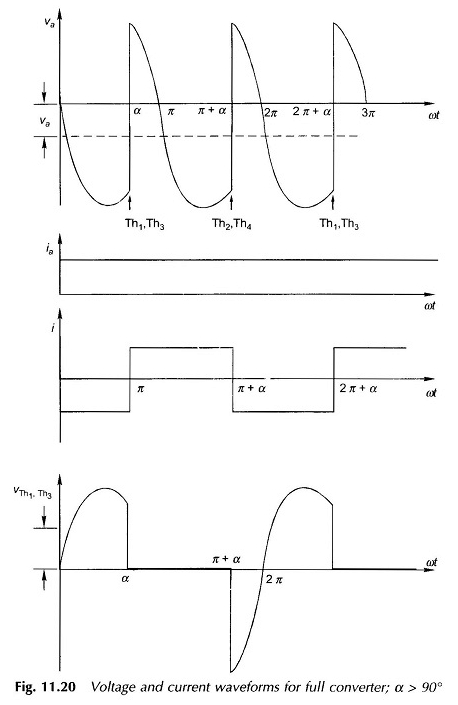
Α> 90 ° için voltaj ve akım dalga dalgaları Şekil 11.20’de temsil edilmektedir. Ortalama motor terminal voltajı artık negatiftir. Motor terminalleri tersine çevrilirse, jeneratörün AC gücüne bir güç kaynağı görevi görecektir.
Bu dönüştürücü tersine çevirme çalışmasıdır ve motorun rejeneratif frenlemesinde kullanılır. Burada bir nokta not edilmelidir.
TH1th3 veya Th2th4 iletim periyodunda, besleme voltajı negatif hale geldikçe, takviye akımı azalmaya başlar, bu da iletken tristörlerin önyargılı olmaya devam etmesi için endüktans polaritesinin tersine neden olur.
Süreksiz takviye akımı için voltaj ve akım dalga dalgalanmaları, yarı dönüştürücü durumunda olduğu gibi bulunabilir. (Bkz. Şekil 11.20).
Tork Hız Özellikleri:
Burada takviye akımının sürekli olduğunu varsayıyoruz. Serbest tekerlekli diyot etkisine sahip bir yarı dönüştürücü için, olağandışı devre denklemleri
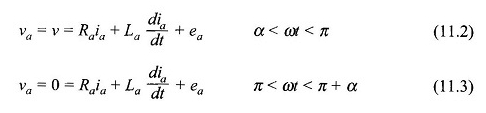
Ayrı bir dönüştürücü için

İzin ν = √2 v sin ωt. Ortalama motor terminali voltajları: Yarı dönüştürücü ile,

Tam bir dönüştürücü ile,

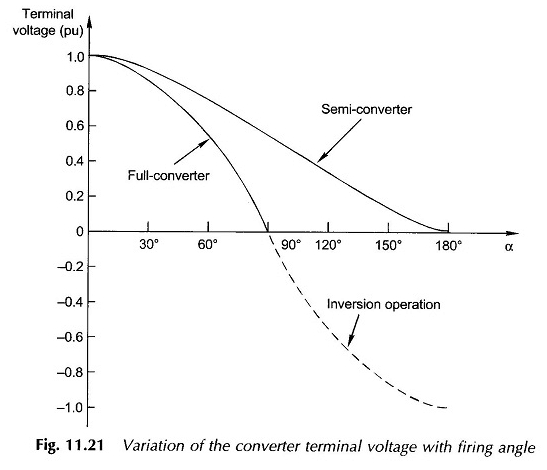
Şekil 11.21, yarı dönüştürücü ve tam dönüştürücü için çekim açısının bir fonksiyonu olarak motor terminalinin voltajındaki varyasyonu vermektedir. Tam dönüştürücü ters çevirme işlemi durumunda, 90 ° <α <180 ° için gerçekleşir.
Ortalama değerler için motor denklemleri

Ve

Denklemin değiştirilmesi. (11.8) ve denklemde (11.5) veya (11.6) denklemlerinin VA’sı. (11.9), dişli kaymaları aşağıdaki gibi verilir:
Yarı dönüştürücü ile,

Tam bir dönüştürücü ile

Denklemlerin ilk terimi. (11.10) ve (11.11), yüklenmemenin teorik hızını temsil ederken, ikinci terim takviyenin direncinin neden olduğu hız düşüşünü temsil eder. Yüksüz teorik hız, α atış açısıyla değiştirilebilir.
Süreksiz bir akım durumunda, motor terminallerindeki ortalama voltaj, ortalama motor n’nin hızına, ortalama motor akımı IA’ya ve α atış açısına bağlı olan β açısına (yok olma açısı) bağlıdır. Bu davanın analitik tedavisi bu kitabın çerçevesinin ötesine geçer.
Çift Dönüştürücü:
Çift dönüştürücü, Şekil 11.22 (a) ‘da gösterildiği gibi dört kadranda çalışabilir. Devresi Şekil 11.22 (b) ‘de temsil edilmektedir. Bunlar, her iki yönde DC’ye dönüşen iki tam örtülü dönüştürücüdür. Çift dönüştürücü, DC terminalleri üzerindeki voltajın pratik olarak anında tersini sağlar.

DC serisinin motor kontrolü:
Bir DC serisi motoru kontrol etmek için yarı dönüştürücüler ve tam dönüştürücüler de kullanılır. Sonuç olarak takviye akımı esas olarak sürekli olan seri alanı nedeniyle devrenin toplam endüktansı yüksektir.
Yönetim motoru denklemleri farklılık gösterir, çünkü akış / kutup artık takviye akımı ile orantılıdır. Tedavi, sürekli akım heyecanlı bir motor kontrolüne benzer ve yer eksikliği nedeniyle burada devam etmeyecektir.