CC motor sürücüleri süpürgesiz (trapezoidal PMAC):
2 kutuplu 2 kutuplu bir DC motorunun enine kesiti Şekil 7.15’te temsil edilmektedir. Geniş kutuplu bir kemerli kalıcı sevgi dolu bir rotora sahiptir. Stator, 120 ° hareket eden üç konsantre faz sargısına sahiptir ve her faz sargısı her iki tarafta 60 ° ‘ye kadar uzanır.
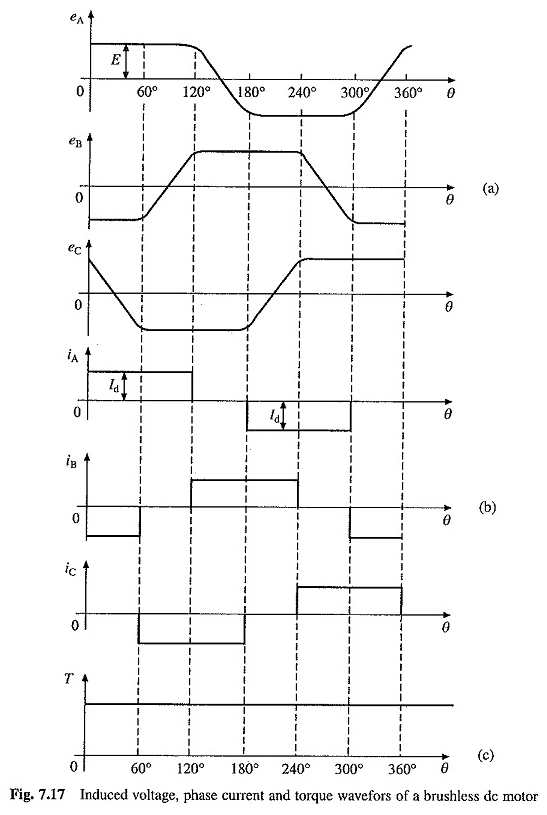
Üç aşamada indüklenen gerilimler Şekil 7.17 (a) ‘da temsil edilmektedir. Trapezoidal dalga formlarının elde edilmesinin nedeni artık açıklanabilir. Antihorarous anlamda yöne döndüğünüzde, Şekil 2’de gösterilen pozisyonun 120 ° ‘ye kadar dönüşü.
7.15, fazın tüm üst sürücüleri Güney Kutbu’nu ve fazın tüm alt sürücülerini Kuzey Kutbu’nu birbirine bağlayacak şekilde bağlayacaktır. Sonuç olarak, A fazıda indüklenen gerilim 120 ° dönüş sırasında aynı olacaktır (Şekil 7.17 (a).

120 ° ‘nin ötesinde, üst bağlantının kuzey kutbundaki bazı sürücüler ve diğerleri Güney Kutbu. Aynı şey alt sürücüler için de olur. Sonuç olarak, fazda indüklenen gerilim, aşağıdaki 60 ° ‘nin dönüşünde doğrusal olarak doğrusaldır. A fazı dalga formunun geri kalanı ve B ve C fazlarının dalgaimleri aynı şekilde açıklanabilir.


Kendi kendine kontrol edilen modda çalışan bir invertörde beslenen bir yamuk PMAC motoru, fırça olmadan CC motoru olarak adlandırılır.

Servo uygulamaları için süpürge olmayan motor DC:
Bir voltaj kaynağı inverter (VSI) ve bir yamuk PMAC motoru kullanan kısa bir DC motoru Şekil 7.16 (a) ‘da gösterilmiştir.
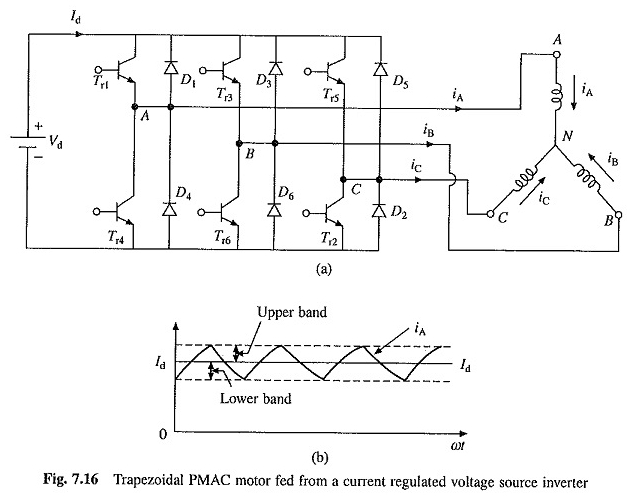
Stator sargıları yıldızlara bağlanır. Şekilde gösterilmeyen rotor konum sensörlerine sahip olacaktır. Yamuk bir PMAC motoru için faz voltaj dalgası dalgaları Şekil 7.17 (a) ‘da temsil edilmektedir. Stator sargılarının Şekil 7.17 (b) ‘de temsil edilen mevcut dürtülerle beslenmesi.
Mevcut dürtülerin her biri 120 ° ‘dir ve indüklenen voltajın sabit ve maksimum olduğu bölgede bulunur. Ek olarak, akım darbelerinin polaritesi, indüklenen gerginlikle aynıdır. Hava boşluğu akışı sabit olduğundan, indüklenen voltaj rotorun hızı ile orantılıdır.
![]()
Şekil 7.17’deki her 60 ° aralıkta, bir faz arasındaki akım ve başka bir fazdan çıkar, bu nedenle, bu aralıkların her birinde motora güç kaynağı ![]()
Motor tarafından geliştirilen tork

Çiftin dalga şekli Şekil 7.17 (c) ‘de verilmiştir. Denk. (7.31) Çift mevcut kimlikle orantılıdır. CC akım kimliğinin CC bağlantısında dolaştığını görüntüleyebilirsiniz. Rejeneratif frenleme işlemi, faz akımlarını tersine çevirerek elde edilir.
Bu ayrıca kaynak geçerli kimliğini tersine çevirecektir. Şimdi güç makineden DC kaynağındaki invertöre ve invertöre gider. Hız tersine çevrildiğinde, indüklenen gerilimlerin polaritesi tersine çevrilir. Şek.
7.17, okuyucu rejeneratif bir frenleme işlemi verir ve mevcut yön tersine çevrildiğinde otomobilin çalışması elde edilir. Şekil 7.17 (b) ‘de gösterilen mevcut dalga formları aşağıdaki gibi üretilir.
0∘ ila 60∘ döneminde ia = id ve ib = –id. Faz A ve Faz B ile paylaşım arasındaki akım AI, TR1 ve TR6 transistörleri olduğunda, A ve B terminalleri sırasıyla kaynak DC’nin pozitif ve negatif terminalleri ile ilişkilidir.
Bir akım, VD, TR1, Faz A, Faz B ve TR6’dan oluşan yol boyunca dolaşacak ve akım değişim oranı IA pozitif olacaktır. TR1 ve TR6 devre dışı bırakıldığında, bu akım faz A, Faz B, diyot D3, VD ve Diot D4’ten oluşan bir yoldan dolaşacaktır.
Akım VD voltajına karşı dolaşması gerektiğinden, IA varyasyon oranı negatif olacaktır. Bu nedenle, TR1 ve TR6 fazını dönüşümlü olarak aktive ederek ve söndürerek, akım A, Şekil 7.16 (b) ‘de gösterildiği gibi bir histerezis bandındaki referans akım kimliğini takip etmek için yapılabilir. Bandı yeterince azaltarak, istenen değere sahip neredeyse bir CC akımı üretilebilir.
Diğer 60 ° aralıklar için operasyon aynı şekilde açıklanabilir. Güç darbelerini uyarılmış voltajlara kıyasla doğru bir şekilde yerleştirmek veya bu altmış aralığın tanımlanması için sinyaller rotor konum sensörleri tarafından üretilir.
Rotorun altı açısal pozisyonunda, indüklenen gerginliğin döngüsü ile tespit edilmelidir. Salon efekt sensörleri manyetik bir alanın büyüklüğünü ve yönünü tespit edebilir. Bu nedenle, üç oda etkisi rotorun altı konumunu tespit edebilir.
Sensörler 60 ° elektrik aralığı monte edilir ve statorun sarılması ile uygun şekilde hizalanır. Optik sensörler de mevcuttur. Trapezoidal PMAC motoru ile kullanılan sensörler, sinüzoid PMAC motoru ile gerekli olanlara kıyasla daha ucuzdur.
Trapezoidal motor da daha ucuz olduğundan, okuyucunun çok daha düşük bir maliyeti vardır. Dinamik yanıt karşılaştırılabilir olsa da, bu okuyucuda tork dalgalanmaları oldukça yüksektir.
Tork dalgalanması, gerginliğin tam trapezoidal olmadığı ve invertörlerin dikdörtgen akım dalga dalgaları üretememesinden kaynaklanır.
Trapezoidal PMAC oynatıcı, PMAC sinüzoidal motor oynatıcısının tercih edildiği yüksek performanslı diskler hariç, servo eğitiminde yaygın olarak kullanılır.
İnvertör ve bir DC motoru ile beslenen trapezoidal PMAC motoru arasında çok sayıda benzerlik vardır. Sürekli bir akım motoru olarak, indüklenen voltaj hızla orantılıdır [Eq. (7.30)], tork takviye akımı ile orantılıdır [Denk.
(7.31)] ve stator ve rotor alanları birbirine kıyasla sabit kalırlar. Bununla birlikte, ilişkili fırçalar ve dezavantajları yoktur, bu nedenle inverter ile beslenen trapezoidal PMAC motoru genellikle bir Süpürge CC motoru olarak bilinir.
Bu motor aynı zamanda elektronik olarak değiştirilmiş bir DC motoru olarak tasarlanmıştır, çünkü inverter burada bir DC motorundaki fırçalar ve anahtarla aynı işlevi yerine getirir, yani
Stator ve sabit rotor alanlarını (ve dörtgen olarak) tutmak için akımları çerçeve sürücüleri arasında hareket ettirmek için birbirine kıyasla.
CC motor sürücüleri düşük maliyetli süpürgeler:
CC -Free CC motor okuyucuları ile ilgili önemli noktalardan biri, sadece dönüştürücü / invertörün motorla entegrasyonudur, okuyucu önemli ölçüde basitleştirilir, bu da daha basit bir kontrol ve maliyette önemli bir azalmaya neden olur.
Çoğunluk uygulamalarında üç faz makinesi kullanılırken, tek faz makineleri ve dört faz da kullanılır. Benzer şekilde, çok çeşitli dönüştürücüler / invertörler kullanılır.
Motorlar akım darbeleri ve ayrıca akım sınırına sahip voltaj darbeleri ile sadece akımın dönüştürücünün ve motorun boyutlarını aşmamasını sağlamak için güçlendirilir. Bu okuyuculardan ikisi aşağıda açıklanmıştır.

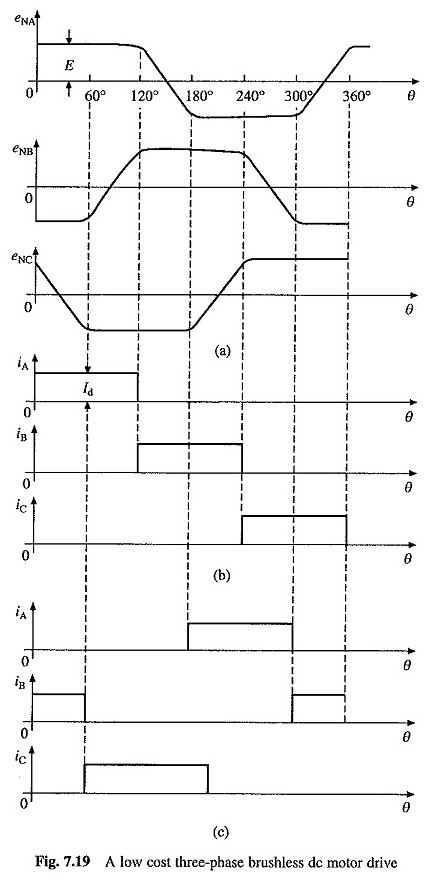
Üç fazlı bir trapezoidal PMAC motoru kullanan düşük maliyetli bir tahrik Şekil 7.18’de gösterilmektedir. Sadece üç transistör ve üç diyot dönüştürücü kullanır, bu da sadece üç motor fazlı pozitif akım veya gerilim sağlayabilir.
İndüklenen voltajlar ve otomobilleşme ve frenleme işlemleri için sağlanan akım Şekil 7.19’da temsil edilmektedir. Motora Şekil 7.19 (b) ‘de belirtildiği gibi 120 °’ de pozitif güç darbeleri sağlandığında, sürüşün çalışması antihorarous yönde elde edilir.
Bu dürtüler, Şekil 7.19 (c) ‘de gösterildiği gibi 180 ° dengelendiğinde, frenleme işlemi elde edilir. Zaman yönündeki dönme için otomatik bobilleşme ve fren işlemleri, sırasıyla Şekil 7.19 (c) ve (b) ‘de belirtildiği gibi senkronizasyon ile elde edilir. Her aşama esas olarak bir helikopter tarafından sağlanır.
NA faz akımı TR1 ve D1 tarafından kontrol edilir. TR1 kaynakta olduğunda, VD NA sargısına bağlanır ve AI varyasyon oranı pozitiftir. TR1 devre dışı bırakıldığında, Diot D1 ve AI varyasyon oranı üzerinden mevcut IA tekerlekleri negatiftir.
Böylece, 0 ° ila 120 ° arasındaki dönemde, TR1 dönüşümlü olarak aktive edilebilir ve devre dışı bırakılabilir, böylece IA akımı bir histerez şeridinde dikdörtgen bir referans akımı i * a takip etmek için yapılabilir.
Şekil 7.16’daki okuyucuya kıyasla, belirli bir kimlik değeri için bu okuyucu tarafından üretilen tork yarısı olacak ve daha yavaş bir dinamik yanıt verecektir. Okuyucu ayrıca daha yüksek tork dalgalanmasına sahiptir.
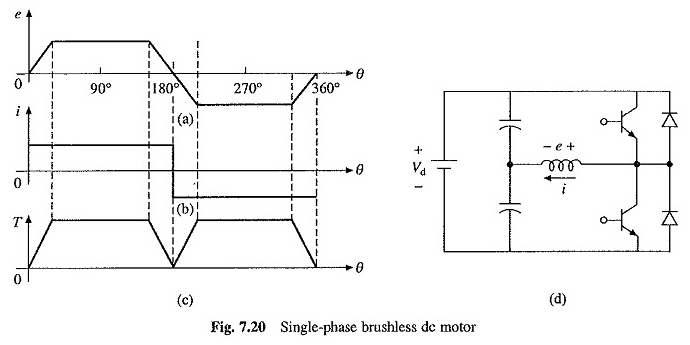
Ayrıca tek fazlı sürekli akım motor eğitimini de inceleyelim. Motorun terk edilmesi, Şekil 7.15’te geniş bir kutup ve her iki tarafta 60 ° yayılmış tek bir konsantre faz sargısında gösterilmiştir.
Fazın eksenin rotor direğinin ekseni ile çakıştığı andan itibaren ölçülelim, daha sonra faz sarısında indüklenen gerilim, Şekil 7.20’de gösterildiği gibi dalga şekline sahip olacaktır. Veya Şekil 2’de gösterilen tek fazlı bir yarım pist dönüştürücüden sağlanacak motor.
7.20 (d) Şekil 7.20 (6) ‘da gösterilen bir dikdörtgen akım dalgası ile. Daha sonra, motor tarafından üretilen tork, Şekil 7.20 (c) ‘de gösterilen bir dalga şekline sahip olacaktır.
Tork büyük bir dalgalanmaya sahip olmasına rağmen, yüksek hızda çalıştığında, tork dalgalanmaları, motor yük sisteminin ataleti ile filtrelenecek ve düzgün bir hız verecektir.
Önemli özellikler ve uygulamalar:
Fırçaların ve anahtarların olmaması nedeniyle, motorsuz güç içermeyen motor eğitiminin geleneksel CC motorlarına kıyasla bir takım avantajları vardır.
Pratik olarak bakım gerektirmezler, uzun bir ömür, yüksek güvenilirlik, düşük atalet ve sürtünme ve düşük radyofrekans paraziti ve gürültüsü vardır.
Düşük atalet ve sürtünme nedeniyle, daha hızlı ivmeye sahiptirler ve çok daha yüksek hızlarda yürütülebilirler – 100.000 rpm’ye kadar ve daha yaygındır. Takviye sargıları stator üzerinde olduğundan, soğutma çok daha iyidir, yani belirli yüksek geziler elde edilebilir.
Bu motorlar yüksek verimliliğe sahiptir,% 75’i aşarken, düşük güç derecelendirmelerinin alan motorları çok daha düşük verimliliğe sahiptir. Geleneksel CC motorlara kıyasla dezavantajlar yüksek maliyetli ve düşük bir başlangıç torkudur. Balais CC motorunun boyutu, geleneksel CC motoruyla neredeyse aynıdır.
CC -Free CC Motor Okuyucuları, kayıt okuyucuları, video kaydediciler için grup okuyucu, bilgisayarlar için sabit sürücüler ve bilgisayar çevre birimleri, enstrümanlar ve kontrol sistemlerinde düşük maliyetli ve düşük güçlü disklerde uygulamalar bulur.
Ayrıca havacılık alanlarında, örneğin jiroskop motorları ve biyomedikal kriyojenik soğutucular ve yapay kalp pompaları alanlarında uygulamaları vardır. Ayrıca elektronik devreler ve ısı dağıtıcı için soğutma fanlarını sürmek için de kullanılırlar.