Fırçasız CC Motoru:
Süpürge olmayan CC motor terimi, maksimum tork gibi stator akımlarını kontrol etmek için yarı iletken kontrolünün kullanıldığı AC senkron motorların sayısız konfigürasyonuna uygulanır. Belirli bir hızda elde edilir.
Geleneksel bir motorda, mekanik kontaktör, anahtar, gerekli torku sağlamak için rotorun manyetik alanları ile stator arasındaki derecelerin yer değiştirmesini korur.
Teorik olarak, bir makinenin stator ve rotor fonksiyonları tersine çevrilebilir, bu da saha sistemini rotor üzerine koyar.

Konvansiyonel bir anahtarlama kullanılırsa kazanılacak bir avantaj yoktur, çünkü anahtar kesimleri sabitlenir ve fırçanın dişlisi rotor alanının hızına dönmelidir.
Konum sensörleri tarafından tetiklenen transistörler veya tristörler tarafından yarı iletkenlere geçmek, fırçaların dişlisini tamamen elektronik bir anahtarlama ile değiştirebilir ve değerli bir kontrol tesisi tarafından küçük makinelere hakim olabilir.

Bu yöntemde, stator sargısının her fazı, rotor üzerine yerleştirilen konum sensörünün sinyali vasıtasıyla bir güç transistörü (veya tristör) tarafından sırayla enerjiktir.

Tiristör / transistör rotor konumunun arka aydınlatılması nedeniyle, stator ve rotor alanı hala senkronizmededir, çünkü tetik frekansı otomatik olarak motor hızına ayarlanır. Transistör sürelerinin uzunluğu, motor torkunun genliğini belirler.
Böylece, elektronik devreler aracılığıyla, süpürge motorları olmayan süpürge sabit ve değişken bir tork çalışması için kontrol edilebilir.
Süpürgesiz CC motorları, aynı KW notu için genellikle daha pahalı olsa da, kaçıran ve fırçalanmış motorların geleneksel motorlara kıyasla belirli avantajları vardır.
Süpürge motoru olmadan CC’nin avantajları:
- Çok az bakım gerektirir veya hiç yoktur.
- Çok daha uzun bir operasyonel yaşamları var.
- ARC nedeniyle patlama veya RF radyasyonu olasılığı yoktur.
- Yan ürünler olarak çalışma olarak fırça veya parçacık üretmezler veya gaz değiştirmezler.
- Sıvılara, yanıcı gazlara maruz kalabilirler ve hatta sıkıca mühürlenebilirler.
- Genellikle fırça DC hizmetçilerinden veya geleneksel DC motorlarından daha etkilidirler.
- Giriş akımı karakteristiğine kıyasla daha hızlı bir tepki ve oldukça doğrusal bir çıkış torku sağlarlar, bu da kendini servo uygulamalarına borçludur.
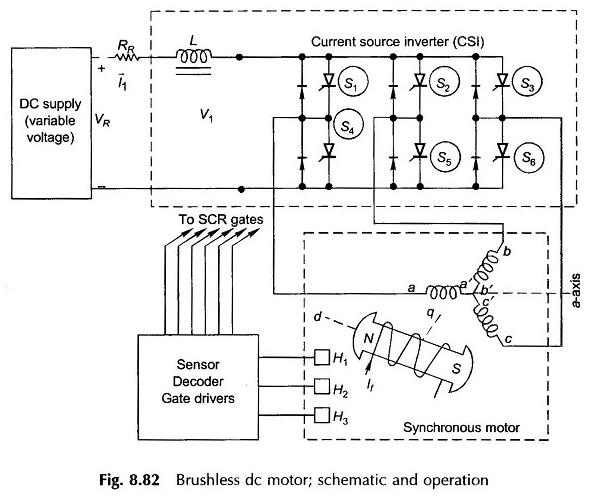
Diyagram ve süpürgesiz CC motoru kullanma prensibi:
Bir süpürge CC motorunun şematik diyagramı Şekil 8.82’de gösterilmiştir. Ayrıca statorun (takviye) üç aşamasını ve belirtilen D ve Q eksenleri ile rotoru gösterir.
Stator, bir endüktans ve altı SCR (S1 ila S6) dahil bir invertör yoluyla değişken bir voltaj akımı kaynağına bağlanır. SCR’ler yerine, güç transistörü veya FET motorun gücüne göre kullanılabilir.
Diyotlar, anahtarlamaya maruz kalan takviye bobinde indüklenen L (di / dt) gerginliğinden (di / dt) korumak için SCR’lere bağlanır.
Rotor üzerine yerleştirilen konum sensörleri, rotorun mekanik pozisyonuyla senkronizmede olabilmek için sırayla bir dizi dizisine neden olan sensör kod çözücülerine ve ızgara sürücülerine bir sinyal sağlar.
Stator ve rotor alanları böylece kendilerini kilitler ve rotorun herhangi bir hızında senkronizmede kalırlar.
İdeal faz akımları, ± I’in 120 ° ‘de sürülen impulslardır, her bir yarıda seçilir ve Şekil 8.83’te belirtildiği gibi birbirinden 120 ° seçme fazına faza taşınır. Gerçek akım formları, artış ve kademeli düşüşle ideal olan dikdörtgen akım dalgalarından farklıdır.
Akımın sabit akım dürtüleri şeklinde aktığı böyle bir invertör, mevcut serivoter (CSI) olarak bilinir.

Şekil 8.83’te gösterildiği gibi invertör çekim dizisi hemen faz akım formlarından kaynaklanmaktadır. Bu 120 ° veya 60 ° SCR atış sekansı için, seçilen aralıklı sensör kodları hassas ışık sensörleri veya salon efekti kullanılarak üretilir.
Şekil 8.84, ışığa duyarlı bu sensörlerin 120 ° sabitte temsil edildiği ve sabit bir ışık kaynağından ışık elde edildiği 120 ° aralık durumunu göstermektedir.
Rotor, 180 ° ‘lik bir kesim ile bir anahtar diski taşır, böylece rotorla çalıştığında, ışık sensörleri 180 ° ışık alır ve 180 ° boyunca karanlıktır. Sensörler, karanlık sırasında bir ışık ve “0” mantığı alırken “1” mantığını üretir.
Üç sensörün (sabit) ve iletişim diskinin (rotor ile döner), elektronik devrelerin, Şekilde belirtildiği gibi SCR’leri çekmek için tetikleyici impulslar ürettiği Şekil 8.83’te belirtildiği gibi sensörün bir kodu dizisi ürettiğini görmek kolaydır.
İletişim diskinin nispi konumu, rotorun kutupları (eksen IEWRT D ve Q) ayarlanabilir. Rotorun anlık konumu için (diskler belirtildiği gibi sabitlenir), sensör kodunun sadece 101’den 100’e çıkacağını not ediyoruz.
Akım B fazından c’ye geçtiğinde “A” aşaması akım dürtüsünün ortasındadır. Şu anda, ortaya çıkan F̅1’e yönelik stator alanı, Şekil 2’de gösterildiği gibi A ekseni A boyunca yönlendirilir.
8.83 (otomotiv akımının pozitif yönü, indüklenen FMF’nin pozitif yönüne karşıdır); Fleming’in sağ kuralını uygulayarak “A” aşamasını kontrol edin. Stator’un kuzey kutbu böylece A ekseni boyunca yönlendirilir.

Bu kuzey kutbu, kuzey rotorunu bir otomobil torku oluşturmak için iter (rotor ve stator N-ucu arasındaki açı β’dır). Stator alanı rotorla senkronizmede çalışırken, her zaman kuzey statoruna işaret eden anahtar diskinde bir dizin işaretleyici yapılabilir.
Bu indeks, rotorun ekseni q ile bir γ açısı yapar (Eksen D 90 ° geç). Açıkçası (β + γ) = 90∘. Açı, iletişim diskini rotorun kutuplarına bağlı şaft üzerinde hareket ettirerek ayarlanabilir.

60 ° seçim aralığına sahip oda efekti sensörleri kullanan kalıcı mıknatısın sürekli akım motoru Şekil 8.85’te gösterilmiştir. Sensörler, N-Pole ve “0” a maruz kaldığında mantık 1 ‘üretir. Bu düzenleme için sensör kodu dizisi kolayca görüntülenir ve Şekil 8.83’te verilir.
A ekseni A boyunca yer alan H3 ile, belirtilen rotor konumuna sensör kodu 000’den 001’e gider, yani akımın “A” fazı için iletimin ortasında olduğu ve B’den c’ye gider. Böylece, F1 A ekseni boyunca yönlendirilir veya stator n-kutup, g ie ekseni boyunca
γ = 0 (bakınız Şekil 8.84). Kalıcı mıknatıs motorları genellikle bu γ değeri için ayarlanır (bu, tork üretimi için daha iyi β = 90 ° ‘ye karşılık gelir).
Fırçasız CC Motor Devre Şeması:
Süpürge olmadan CC motorlarla beslenen bir CSI’nın Novotny-Abbas devre modeli Şekil 8.86’da çizilmiştir. Şekil 8.82’de yapılandırılmış fırçalar olmadan DC makinesinin eşzamanlı makinesine akan (dengeli) akımlar, Şekil 8.83’ün dalgalanmalarında belirtildiği gibi, dikdörtgen darbelerdir.
Gerçek akımlar biraz yuvarlak dürtülerdir. Analizimiz temel AC akımına dayanacak ve harmonik akımlar göz ardı edilecektir. Bunlar, stationary olmayan bir alan olarak rotor alanı sıfır net tork üreten mekansal harmonik hava tespitleri alanları üretir.
Ayrılmak
İ1 = DC kaynağı tarafından inverter tarafından güçlendirilen akım
BU YÜZDEN
Im (mevcut aşama rms = temel akım
= (√6 / π) i1; Fourier serisiyle gösterilebilir
Şekil 8.86 (a) ‘da, senkron makine modeli, senkron rektal eksen reaktansı XD ve EMF EF uyarımı ile karakterize edilen olağan olanıdır ve burada XD ve EF, çalışma frekansını yöneten hıza doğrudan değişir.
EF genliği elbette mıknatıslanmanın özelliği ile rotor alanının akımıyla bağlantılıdır. Karşılık gelen faz diyagramı, Şekil 8.86 (b) ‘de çizilir, burada IM, faz akımı, v (senkron makinenin Ca çıkış voltajı / terminal voltajı) açısına göre çizilir. Mevcut önde gelen işlem gerçekleştirilir, çünkü SCR anahtarlamasında akımın yok olmasına katkıda bulunur.

Şimdi koşullarla AC CSI modelini oluşturacağız:
- IAE = im
- Model devresinin parametresi RAE direncidir.
- Ege ve IAE aşamada.
Bu koşullar, modelin bu kısmının gerçekten eşdeğer CC makinesini temsil etmesini sağlayacaktır.
Ayrıca Şekil 8.84’te, I̅m = ̅ae ve EF arasındaki faz açısının gerçekten γ açısı olduğunu görüyoruz. Şimdi senkron makinenin fazı tarafından dönüştürülen gücü, sahip olduğumuz eşdeğer DC makinesininkine asimile etmek

Bu sonucu faz diyagramına çevirin (Şekil 8.86 (b)), V ve EGE’nin Şekil 8.86 (a) ‘daki devrede belirtildiği gibi bir XE hayali reaktans ile bağlantılı olduğu açıktır. Şimdi Tev ve Rae için ilişkiyi alacağız. İhmal İnvertör Kayıpları

EGE’de bir kısa devre hayal edin, yani ege = 0, var
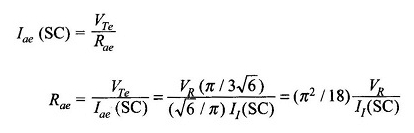
Ancak
VR / I1 (SC) = RR; İnvertör tedarik eden dahili doğrultucu direnç
BU YÜZDEN
![]()
Fırçasız CC motorunun özellikleri:
Şekil 8.84 (c)
![]()
Denklemde daha önce gösterildiği gibi. (8,121)
![]()
Ancak EF olarak yazılabilir
![]()
Veya
- Φf = sadece hareketin neden olduğu akış / kutup.
Denklemdeki değerlerin yerine geçme. (8.124)
![]()
Veya

COS γ etkisi hariç, bu denklem geleneksel DC makinesiyle aynıdır.
Gelişmiş çift tarafından verilir
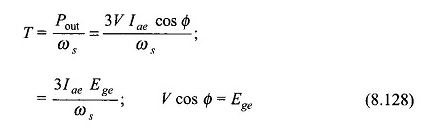
Denklemi kullanarak. (8.126),
![]()
Mıknatıslanmanın özelliği sözde doğrusal ise
![]()
Hız ve tork denklemleri o zaman
Senkron bir motorda, alan akımı azaltıldığından, PF’si geride kalır. Ancak fırçaları olmayan bir CC motorunda (rotor konumunda geri bildirim olan senkron bir motordur), denkleme göre hızda bir artışa neden olursa saha akımındaki azalma.
(8,131) geleneksel bir CC motorunda olduğu gibi. Bu, aşağıdaki akıl yürütme ile niteliksel olarak açıklanabilir. Şekil 8.86’ya referans olarak, azalmış gibi, EF ve bu nedenle EGE azalır ve RAE çok düşüktür, bu IAE = IM’de orantısız bir artışa neden olur.
Sonuç, rotorun hızlanmasıdır. Rotorun hızındaki artış, IMXD voltaj düşüşü arttıkça EF’nin azalmasına ve IM’nin artması, çalışma frekansındaki artışla artar. Sonuç, yeni ve daha yüksek bir hızda düzenli bir işlemdir ve daha az ve hatta geç kalır.
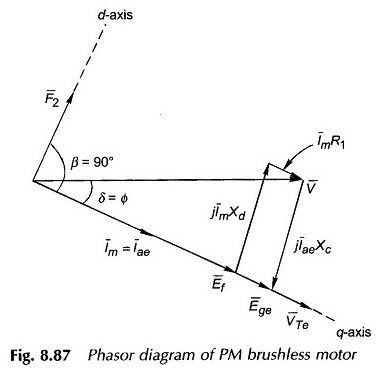
Süpürge Olmayan Motor DC PM:
PM küçük sürekli akım motoru genellikle PM türleridir. Böyle bir motor rotorunda, MMF F2 sabit kalır ve ayrıca bu makinelerdeki γ açısı sıfıra ayarlanır, yani F2 ve F1 (takviye MMF) 90 ° ‘lik bir açı (gelişmiş tork için daha iyi).
Ek olarak, Faz R1 sargısına direnç ihmal edilemez ve bu nedenle DC modelinde RAE’ye eklenmelidir. Γ = 0 için faz diyagramı, aşağıdaki gözlemlerin yapıldığı Şekil 8.87’de çizilmiştir
- Xc = kapasitif reaktans = xD (genlikte).
- PF açısı geride kalıyor.
Denklemlerin ilişkisi. (8,127) ve (8.129) hız ve tork için denklem hariç uygulanır. (8.124) şimdi
![]()