Kapalı CC motor döngüsünde hız kontrolü:
CC motor kapalı döngü – dönüştürücüler (doğrultucular ve helikopterler) kontrolü, çok düşük bir termal kapasiteye sahip yarı iletken aygıtlar kullanılarak oluşturulur. Bu nedenle, geçici ve istikrarlı akımları aynıdır.
CC motorları, başlangıç, frenleme ve ters çevirme gibi kısa vadeli geçiş işlemleri sırasında nominal akımı 2 ila 3,5 kez taşıyabilir. Akım yüksek, tork yüksek ve geçiş tepkisi daha yüksek.
Bu nedenle, geçiş işlemleri sırasında hızlı bir yanıt gerektiğinde, motor akımı yetkili maksimum değere sahip olabilir. Dönüştürücü derecesi daha sonra motor akımının maksimum yetkili değerine eşit seçilir.
Önemli akım gösterimi nedeniyle, dönüştürücünün maliyeti artık daha yüksek olacaktır. Hızlı geçiş tepkisi gerekmediğinde, dönüştürücünün akım notu, düşük dönüştürücünün maliyetini korumak için motor akım sahiline eşit olarak seçilir.
Açık döngü diskleri, akım sınır kontrolü ve dönüştürücüyü akım aşırı yüklerden korumak için sağlanır.
CC motor diyagramlarının kapalı döngü hızının kontrolü, akımı bir güvenlik sınırındaki akımı sınırlamak ve ayrıca okuyucuyu yetkilendirilen maksimumdaki maksimum olarak hızlandırmak ve yavaşlatmak ve geçiş işlemleri sırasında torklamak için bir dahili akım kontrol döngüsü ile birlikte verilir.

Bununla birlikte, kullanılan dönüştürücü de fren işlemleri kapasitesine sahip olduğunda, akım veya maksimum torktaki yavaşlamanın mümkün olacağına dikkat edilmelidir.
Ayrıca, tedariki AC olduğunda kontrollü doğrultucuun kullanılacağı ve güç kaynağı DC olduğunda hoporanın kullanılacağına da dikkat çekilebilir.
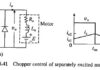
Hızın altındaki ve üstünde kapanan hızın kontrolüne temel yaklaşım, Şekil 5.47’deki okuyucu tarafından açıklanmaktadır. Okuyucu, dahili akım kontrol döngüsünü ve dış mekan hız döngüsünü kullanır.
Böyle bir okuyucu, temel hızın altında sabit bir alan akımı ve değişken bir kesinti voltajında ve sabit bir takviye voltajında ve temel hızın üzerinde değişken bir alan akımında çalışacaktır. Bu nedenle takviye ve alan tam kontrollü doğrultucular tarafından beslenir.
Takviye tam kontrollü bir doğrultucu ile beslendiğinden, ön fren mümkün değildir; Okuyucu sadece şarj torku nedeniyle yavaşlar. Dahili akımın mevcut sınırlayıcı ile kontrolü nedeniyle, ivme bilgilendirilmiş ve yetkilendirilmiş maksimum torkla gerçekleşecektir.
Yarı iletken dönüştürücüde, beslenen PI (orantılı ve integral) kontrolörüne yol açar, çünkü aksi takdirde bir sorun haline gelebilecek gürültüyü filtreler. PI denetleyicisi ayrıca denge durumuna iyi bir hassasiyet verir.

Önce operasyonu temel hızda inceleyelim. Alan kontrol döngüsünde, emf E, nominal takviye voltajının 0.85 ila 0.95 arasında seçilen bir referans voltajı e * ile karşılaştırılır.
En yüksek değer, düşük takviye devre direnci motorları için kullanılır. Temel hızın altındaki hızlar için, büyük bir EF hata değeri nedeniyle doygunluk alanı denetleyicisi. ΑF alanı doğrultucuunun ödül açısı sıfırda tutulur ve zemine nominal voltaj uygulanır.
Bu, motorun temel hızın (ωMB) çalışması için nominal alan akımını garanti eder. Hız referansı, yüksek hız hatası hatası nedeniyle ω * m1’den ω * m2’den (ω * m2 <ωm1) arttırıldığında, akım sınırlayıcı doyurur ve geçerli referansı maksimum yetkili değere tanımlar.
Okuyucu mevcut ve maksimum torku hızlandırır. Hız ω * m2’ye yaklaştığında, akım sınırlayıcı detaylandırılır ve sürüş ωm2 hızında ve yük torkuna eşit bir motor tork veren akımda ayarlanır.
Hız referansı ω * M1’e indirgenirse, geçerli referans sıfır olarak tanımlanır ve yük torku nedeniyle okuyucu yavaşlar.
ΩM ω * M1’den biraz daha düşük hale geldiğinde, motor akımı tekrar akar ve son olarak ωm1 hızında kurallara ve motor torkunun yükleme torkunu dengelediği akıma yol açar. Negatif bir hız hatası için, i * a sıfır olarak tanımlanır çünkü negatif I * a kullanılmaz.
Ancak, PI denetleyicisini şarj edecek. Referans hızı tekrar arttığında, bu da pozitif hatayı hızlandırır, yüklü PI denetleyicisinin cevaplanması daha uzun sürer, bu da geçici olanın tepkisini daha yavaşlatır.
Şimdi operasyonun temel hızın üzerinde incelenmesine izin verin. Temel hıza yakın, alan denetleyicisi doymuş. Şimdi, referans hızı temel hızdan daha büyük bir hız için tanımlanmışsa, geçerli referans maksimum yetkili değerde tanımlanır.
ΑA takviye doğrultucuunun atış açısı başlangıçta artacak şekilde azalır. Motor hızlanır, EF artar, EF azalır, alan akımını azaltır.
Böylece, motor hızı artmaya devam eder ve motor hızı referans hızına eşit olana kadar alan akımı azalmaya devam eder. Hız hatası artık küçük olacağından, orijinal değere yakın bir değere geri dönecektir.
Böylece, temel hızın üzerindeki hız kontrolü, nominal değerin yakınında tutulan takviye voltajı ile saha kontrolü ile elde edilir. Saha kontrol bölgesinde (yukarıdaki temel hız), okuyucu saha zaman sabitinin büyük değeri nedeniyle çok yavaş tepki verir.