CC CC kıyıcı kontrolü ayrı ayrı:
Otomobil Kontrolü: Ayrı olarak uyarılan CC motorunun transistör kıyıcı kontrolü Şekil 5.41 (a) ‘da gösterilmiştir. TR transistör t periyot ile periyodik olarak çalıştırılır ve bir ton süreyle açık kalır.
Mevcut kuluçka, sürekli iletim sağlayacak kadar yüksek bir frekansta çalışır. VA motor voltajının dalga formları ve sürekli iletim için IA takviye akımı Şekil 5.41 (b) ‘de temsil edilmektedir. Transistör dönemindeki dönemde, 0 ≤ t ≤ ton, motor terminal voltajı V’dir.


Operasyon


Bu aralıkta, takviye akımı IAL’den IA2’ye gider. Motor bu aralıkta kaynağa bağlandığından, buna servis aralığı denir.

T = tonda, TR durdurulur. Motor akımı DF diyot ve motor terminal voltajı üzerinden serbest tekerlekler, ≤ t ≤ T aralığında sıfırdır. Bu aralıkta motorun serbest tekerlek aralığı olarak bilinen çalışması,

Bu aralıkta motor akımı IA2’den IA1’e düşer.
T -chopper dönemindeki fonksiyon aralığı raporuna hizmet raporu veya hizmet döngüsü (Δ) denir. Bu yüzden

Şekil 5.41 (b)

(5.2) ve (5.7) denklemi de burada uygulanabilir

Denklemler. (5.7), (5.8). ve (5.114)

Hız torkunun özelliğinin doğası Şekil 5.43’te temsil edilmektedir.
Rejeneratif Frenleme:
Rejeneratif frenlemenin çalışması için ayrı ayrı uyarılmış CC motorunun helikopterlerinin kontrolü, Şekil 5.42 (a) ‘da gösterilmektedir. TR transistörü periyodik olarak bir T periyodu ve ton periyodu ile çalışır.
VA motor voltajının dalga formları ve sürekli iletim için IA takviye akımı Şekil 5.42 (b) ‘de temsil edilmektedir. Genellikle harici bir endüktans eklenir. TR yandığında, IA1’den IA2’ye artış.
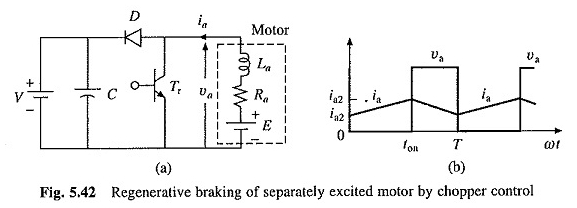
Şimdi jeneratör olarak çalışan motor tarafından elektriğe dönüştürülen mekanik enerji, takviye devresinin endüktansında depolanan manyetik enerjiyi kısmen arttırır ve geri kalanı çerçevenin direncinde ve transistöründe dağıtılır.
TR devre dışı bırakıldığında, takviye akımı Diyot D ve kaynak V’den geçer ve IA2’den IA1’e gider. Saklanan elektromanyetik enerji ve makine tarafından sağlanan enerji kaynakla birlikte verilir.
0 ≤ t ≤ tonu artık enerji depolama aralığı ve ton aralığı ≤ t ≤ t hizmet aralığı olarak adlandırılır. Δ, T döneminde hizmet aralığının raporu olarak tanımlanırsa,

Şekil 5.42 (b)

ve Şekil 5.42 (a)

Tersine döndüğünden beri
![]()
Denklemler. (5.8), (5.118) ve (5.119)

Hız torkunun özelliğinin doğası Şekil 5.43’te temsil edilmektedir.

Makine ve Rejeneratif Fren:
Hopper devreleri. 5.41 ve 5.42, Şekil 5.44’te bir helikopter iki çeyreği elde etmek için birleştirilebilir, bu da ön tarafta sap ve rejenerasyon frenleme işlemleri sağlayabilir. Diyot D1 ile TRL transistör, Şekil 1’e benzer helikoputif bir devre oluşturur.
5.41 ve bu nedenle doğrudan otomobillerin çalışması için kontrol sağlar. D2 diyotlu TR2 transistörü, Şekil 5.42’ye benzer helikoputif bir devre oluşturur ve bu nedenle bir ön frenleme işlemi için bir kontrol verir.
Böylece, sürüş işlemi için TRL transistör kontrol edilir ve frenleme işlemi için TR2 transistör kontrol edilir. TRL’den TR2’ye kontrol değişikliği, otomobil operasyonundan frenlemeye ve tam tersine gider.
Arabadan frenlemeye hızlı geçişin gerekli olduğu servis cihazlarında, TRL ve TR2 aynı anda kontrol edilir. Bir t döneminde, TRL 0’dan ΔT’ye bir kapı sürücüsü alır ve TR2, ΔT’den T’ye bir kapı sürücüsü alır, burada Δ TRL için hizmet raporudur.
Sonuç olarak, 0 ila ΔT motoru, IA motor akımının pozitif veya negatif olup olmadığına bağlı olarak TRL veya D2 yoluyla kaynağa bağlanır. Bu dönemden bu yana, bu dönemde mevcut değişim oranı her zaman pozitiftir.
Benzer şekilde, ΔT’den T’ye, motor takviyesi, AI’nın pozitif veya negatif olup olmadığına ve bu dönemde mevcut değişim oranı her zaman negatiftir. Motor terminalinin voltajı ve mevcut dalga dalga elleri Şekil 5.44 (b) ‘de temsil edilmektedir.
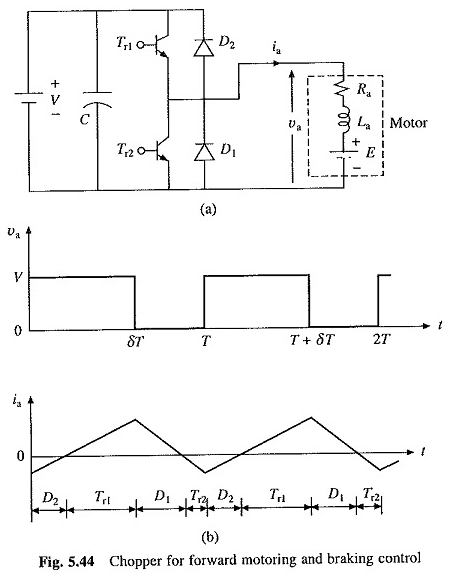
Şekil 5.44 (b)

Yukarıdaki denklem, motorun (+ VE IA) çalışmasının δ> (E / V) ve rejeneratif frenleme işleminin δ <(E / V) ve otomobil frenlemeye geçişinin gerçekleştiğinde gerçekleştiğini ve tersi δ = (E / V) olduğunda gerçekleştiğini gösterir.
Yukarıdaki denklemler, Şekil (5.41) ‘de helikopter için elde edilenlere benzer ve bu nedenle aynı sayıları dikkate alarak
Dinamik Frenleme:
Dinamik fren devresi ve dalgalanmaları Şekil 5.45’te temsil edilmektedir. 0 ≤ t ≤ ton aralığı boyunca, AI IA1’den IA2’ye artar. Üretilen enerjinin bir kısmı endüktans içinde saklanır ve dinlenme RA ve TR’de dağıtılır. Ton ≤ t ≤ T aralığı sırasında, IA2’den IA2’ye düşer.
Endüktans içinde üretilen ve depolanan enerjiler, fren direnci RB, RA ve diyot D’de dağılır. Transistör TR, RB’de dağılan enerjinin genliğini kontrol eder ve bu nedenle etkili değerini kontrol eder.

AI’nın dalgalanmadan bir DC olması gerekiyorsa, helikopterlerin bir çalışma döngüsü sırasında RB’de tüketilen enerji
![]()
RB tarafından tüketilen ortalama güç

Etkili RB değeri

Veya

Denklem (5.122), fren direncinin etkili değerinin 0’dan RB’ye adım atmadan değiştirilebileceğini gösterir.