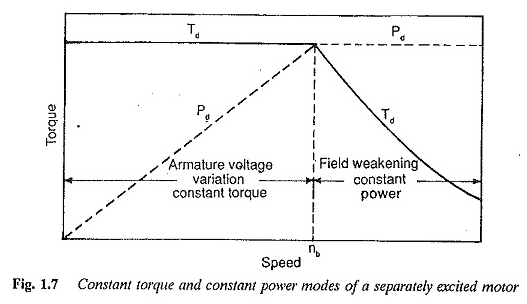
Hız torklu Shunt Motor DC:
Önceki tartışma, takviyenin gerginliğindeki varyasyonun sürünme hızları verdiğini göstermektedir. Basit reostatik yöntem, az sertlik ve az stabilite ile hız torkunun bir DC şant motoru özelliği sağlar.
Ward Leonard’ın (gerginliğin düzgün değişimi) kontrolü, makul sertlik ve stabilite ile düz bir özellik üretir, ancak yüksek bir başlangıç maliyeti. Yeterli sertliğe sahip sürünen hızlar elde etmek için düşük başlangıç maliyetine sahip basit bir yöntem Şekil 1.8’de temsil edilmektedir.
Takviye ile seri dirençli geleneksel reostatik kontrol, takviyeyi düşük dirençle çekilerek değiştirilir. Serinin ve şant dirençlerinin değerlerini değiştirerek, hızla doldurulmuş özellikler istenen şekle sahip olacak şekilde tasarlanabilir.
Sadece seri bir direnç kullanarak basit reostatik kontrolde, barınaktan gerilim V’dir. Takviye RSH tarafından şantlaştırılırsa, çerçeveden voltaj yük olmadan bile V’den daha düşük olur.
Boş hız, uygun RS ve RSH değerleri ile istenen değere düşer. RSH değeri ne kadar küçük olursa, yüklemeden çerçeveden gerilim o kadar gerginlik olur. Son olarak, yüksüz hızı azalır. RSH değeri, yemeğin özelliğini yapmada da etkilidir.


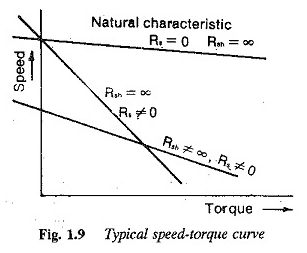
Civciv hızının tipik özellikleri, şant DC motorunun doğal özelliğinin ve basit bir reostatik kontrole sahip karakteristik olduğu Şekil 1.9’da temsil edilmektedir. Bu modifikasyon, düşük hızda sabit bir işlem gerekiyorsa kullanılabilir. Okuyucunun kesin durması için kullanılabilir. RSH değerini değiştirerek, hız çok düşük bir değere indirgenebilir ve belirli bir durdurma için uygun mekanik fren uygulanabilir. 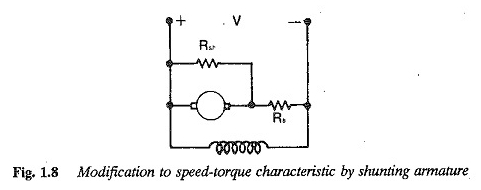
Şekil 1.8’e atıfta bulunarak, 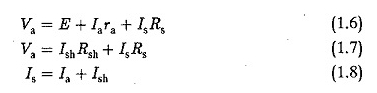
Bu denklemleri kullanarak,

Ayrıca (1.8) ve (1.7) denklemlerinden

Bu ilişkileri denklemde kullanmak. (1.6) Var

TD açısından / a’nın yerine geçin,

Hız-toe’nin özelliği Şekil 1.9’da temsil edilmektedir. Aşağıdaki noktalar şekilden açıktır:
1. yük hızı (TD = 0) 
değeri olarak 
RSH değeri daha düşük, bu değer daha küçük. RSH küçükse eğim de azalır. Böylece sertlik iyileştirilir ve basit reostatik kontrol ile ilişkili olarak kararlı çalışma sağlanır.
2. Pürüzsüz hız kontrolü, RSH ve RS’nin nasıl değiştiğine bağlıdır. Hız kontrolü şaşırır çünkü dirençler yayılmış bir denizcide değişebilir.
3. Temel hızın altındaki mağara mümkündür. RSH’nin varyasyonlarından sonra boş hız değişir. RSH azaltıldığında boş hızda net bir düşüş gözlenebilir. Hız kontrolü, R’lerin değerini değiştirerek elde edilir.
Yöntem, alanı daha güçlü hale getirmeye eşdeğerdir ve alan akımını belirli bir takviye akımına artırarak elde edilenlere benzer sonuçlar verir.
4. Yöntem, sabit tork yükleri için uygundur, böylece takviye akımı nominal değerinde olur.
5. Hassas durak ise yöntem uygundur
6. Sürekli operasyon için ekonomik değildir. RSH ve RS kayıpları sistemi etkisiz hale getirir. Kısa dönemler için kararlı rampa hızları gerekliyse yöntem kullanılabilir.