Sürekli akım motor tork denklemi:
CC voltajı, DC tarafından heyecanlı alanı ile sürekli bir akım motorunun çerçevesine uygulandığında, bir tork geliştirilir ve takviye çalışır.
EMF’nin takviye égisinde indüklediği bir hızda, uygulanan voltajı dengeler ve DC motorunun aşağıdaki tork denklemi karşılanır.
![]()

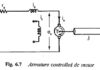
EB, EMF’nin sabit hızda düzgün manyetik alandaki dönüş nedeniyle takviyeye indüklenmesidir. Bu EMF’nin doğası terminal gerilime karşı çıkmaktır ve bu nedenle EMF olarak da adlandırılır. Devre koşulları Şekil 4.47’de temsil edilmektedir.
Şekil 4.47 (a), uyarma işleminin bağımsız bir AI akımı tarafından sağlandığı uyarılmış bir motoru ayrı ayrı temsil eder. Şekil 4.47 (b), alanların ve alanların aynı olduğu bir seri motoru göstermektedir. Üretilen gerilim tarafından verilir


Veya
- Φ kutupla akıştır
- Z, bir dizi inmarg sürücüdür
- N diyette hız
- 2p kutup sayısıdır
- 2a, çerçevedeki paralel yolların sayısıdır
Belirli bir CC için temel makinenin temel denklemine yol açar
![]()
Veya 
Çerçeve tarafından geliştirilen sürekli akım motorunun tork denklemi,

KA’ya motor inatürü sabiti denir.

EQS 4.23 ve 4.25 kullanarak var,

Heyecanlı bir motorda ayrı ayrı φ, takviyenin reaksiyonu ihmal edildiğinde veya dengelendiğinde belirli bir alan akımına sabit varsayılabilir.
Denklemin. 4.27 Bir DC motorunun hızının (VA – IRA) değerini değiştirerek değiştirilebileceği açıktır.
DC motorunun tork denklemi normalde iki şekilde gerçekleştirilir:
- Ward Leonard sisteminde olduğu gibi takviyeye uygulanan gerginliğin değerini değiştirerek (Şekil 4.48).
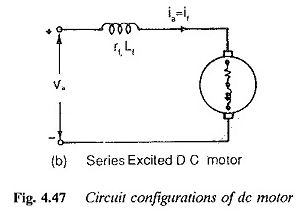
- Takviye ile seri olarak ek direnç ekleyerek (Şekil 4.49).

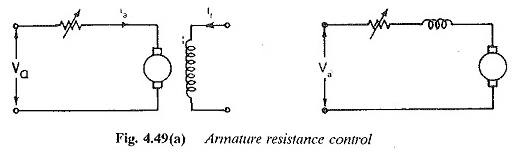

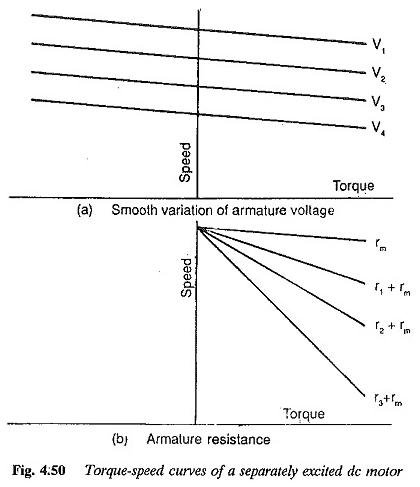
İlk olarak, değişken bir voltaj güç kaynağı gereklidir. Operasyon kayıpsız ve etkilidir. DC motorunun tork denklemi, hız özelliğine bağlı olarak Şekil 4.50’de gösterilmiştir. İkincisinde, eklenen ek bir direnç ek kayıpları içerir ve motor daha az etkili hale gelir.
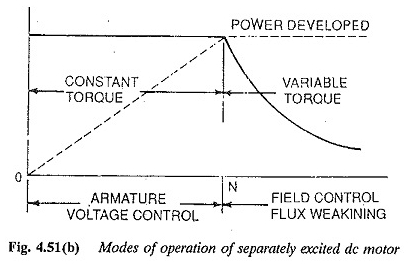
DC motorunun karakteristiğinin hız torku denklemi Şekil 4.51’de temsil edilmektedir. Her iki durumda da, sıfır hıza kadar çok küçük hızlar mümkündür. Motor sıfırdan temel hıza sabit bir torkta çalışır.

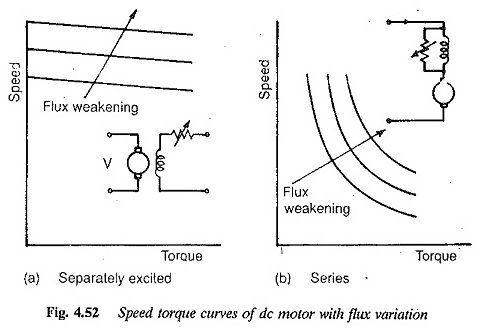
Bir DC motorunun hızı da alan akışındaki varyasyon ile değiştirilir. Bu kontrol yönteminde temel hızların üzerindeki hızlar mümkündür. Bu yöntem değişken tork yükleri için uygundur.
Değişken voltaj kullanarak hız kontrolü çok etkilidir. Bu değişken voltaj bir jeneratörden elde edilir. Yöntem Ward Leonard yöntemi olarak bilinir. Çok yönlüdür ve aşağıdaki özelliklere sahiptir:
- Motor, motor alanını düzgün bir şekilde ayarlayarak sabit tork (sabit takviye akımı) için hızlandırılabilir.
- Rejeneratif motor frenleme mümkündür ve motor çok hızlı bir şekilde dinlenebilir.
- Motor çeyreğini kullanan dört tane basittir.
- Sermaye maliyeti daha yüksektir, çünkü ek bir MG seti gereklidir.
- Ekipman alan gerektirir.
Thiristorların ortaya çıkması ve tristörleri kullanarak güç dönüştürücülerin geliştirilmesi, elektrik motorlarının hızının kontrolünü daha kolay ve daha basit hale getirdi. Faz kontrolü düzelticileri, bir DC motorunun çerçevesine değişken bir CC voltajı sağlar (Şekil 4.53).
Bu dönüştürücüler ayrıca invertörler olarak çalışabilir, bu durumda sürekli akım motorunun rejeneratif frenlenmesi mümkündür. Bu dönüştürücülerin uygun bir bağlantısı ile, iki rotasyon yönünde bir otomobil ve rejenerasyona izin veren geri dönüşümlü bir eğitim mümkündür.
Bu dönüştürücüler daha esnektir, daha hızlı bir yanıta sahiptir ve daha az yer kaplar. Bu dönüştürücüler kullanılarak bir Leonard Ward statik sistemi mümkün olabilir.
Bununla birlikte, CA tarafında geç akım, zengin harmonik içeriğe sahip -sinusoidal olmayan giriş akımı nedeniyle kötü bir güç faktörü gibi bazı dezavantajlar vardır. Şarj voltajı bir dalga içeriği tarafından üst üste bindirilir.
Şarj akımı ayrıca orta akım ve RMS raporları ortalama bir akıma sahip bir dalgalanmaya sahiptir. Akımı düzeltmek için yükün yanında büyük bir endüktans gereklidir. Bazen şarj akımı süreksizdir, bu da performansı azaltır.
Daldırma içeriği, motorun ısıtılmasını ve değiştirilmesini etkiler. Sonuç olarak, motora, normal bir doğrudan akım güç kaynağına kıyasla performansta çok az varyasyona neden olan bir güç kaynağı sağlayan doğrultucu geliştirmek gerekir. Bazen DC motorunun tasarımı, herhangi bir dönüştürücüde kullanılabilecek şekilde değiştirilir.

Normal CC gücünde bir CC motor, başlangıç akımını sınırlamak için başlangıç direncini gerektirir. Bir tristör dönüştürücüden beslendiğinde, başlangıç direnci dağıtılabilir ve yumuşak bir başlangıç mümkündür. Motor sabit tork için hızlandırılabilir.
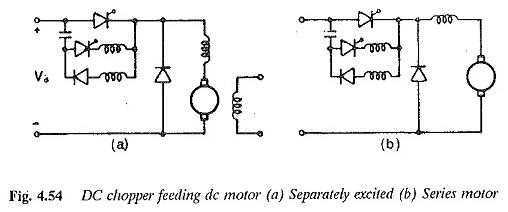
Hopper CC, sabit voltaj haddeleme yastıkları arasında müdahale edilebilir ve CC motoru, hızı kontrol etmek için motora değişken bir voltaj sağlar. Bu durumda rejenerasyon da mümkündür. İki ve dört çeyreğin operasyonları için Leonard Static’in bir şeması mümkündür.
Kıyıcı çıkış voltajı darbeler biçimindedir. Helikopterin zaman oranı ortalama gerginliği değiştirecek şekilde kontrol edilebilir. Çıkış akımı, ton ve helikopterin toff sırasında katlanarak değişir. Çıkış akımı iki sınır arasında değişir.
Dalgalanma daha fazla ve şarj akımı küçükse süreksiz bir iletim olasılığı vardır. Hopper ayrıca belirtilen akım sınırları ile kontrol edilebilir, yöntem geçerli sınır kontrolü olarak bilinir. Bu helikopterlerin sıklığını düzeltir.
Sidülasyon içeriği uygun bir sınır seçimi ile sınırlandırılabilir. Akım sınır kontrolü süreksiz iletime daha az tabidir. Helikopterlerin frekansındaki artış kayıplar getirir. Tatlı başlangıç ve ivme mümkündür.
Pil yiyecek sağladığından harmonik içerik sorunları ve güç faktörü yoktur.
Faz veya DC helikopterlerinde kontrol edilen dönüştürücüler üzerinde çalışırken bir DC motorunun performansı, normal CC güç kaynağı çalıştırıldığında performanstan çok farklıdır.
Yeminli mevcut içerik motor performansını etkilerken, harmonikler ve zayıf güç faktörü hat performansını etkiler. Davranış anlayışı, daha iyi performans elde etmek için dönüştürücü veya motor tasarımını geliştirmeye yardımcı olur.