Types de moteur à courant continu:
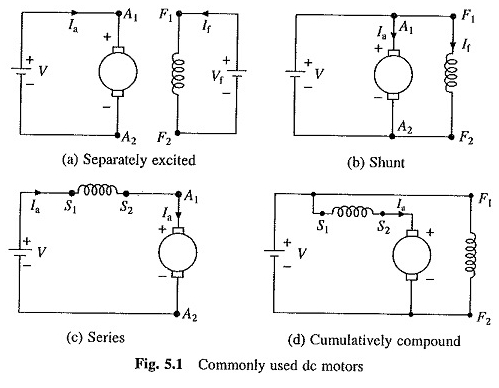
Les types de moteur courant couramment utilisés sont représentés sur la figure 5.1. Dans un moteur excité séparément, les tensions de champ et d’armature peuvent être contrôlées indépendantes les unes des autres. Dans un moteur de shunt, le champ et l’armature sont connectés à une source commune.
Moteur a courant continu – moteur à courant continu
En cas de moteur en série, le courant de champ est le même que le courant d’armature, et par conséquent, le flux de champ est fonction du courant d’armature.
Dans un moteur à composé cumulatif, la force magnéto-motive du champ série est fonction du courant d’armature et est dans le même sens que MMF du champ de shunt.
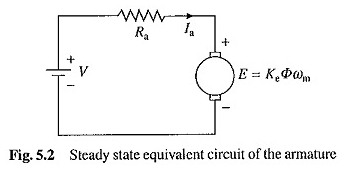
Le circuit équivalent à l’état d’équilibre de l’armature d’une machine CC est illustré à la figure 5.2. La résistance RA est la résistance du circuit d’armature.
Pour les moteurs séparément excités et shunt, il est égal à la résistance de l’enroulement de l’armature et pour les moteurs en série et composés, il s’agit de la somme des résistances d’enroulement de l’armature et du champ. Les équations de base applicables à tous les types de moteur CC sont

où
Φ – est le flux par pôle, Webers;
IA – Le courant d’armature, A;
V – La tension de l’armature V;
RA – La résistance du circuit d’inhabituel, ohms;
ωm – La vitesse de l’armature, rad / sec;
T – Le couple développé par le moteur, NM; et
KE – la constante du moteur.
De l’équation. (5.1) à (5.3) 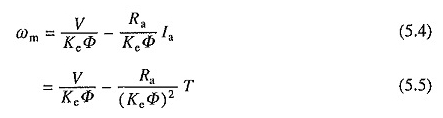
Motors shunt et séparément excité:
En cas de shunt et de moteurs excités séparément, avec un courant de champ constant, le flux peut être supposé constant. Laisser
![]()
Puis à partir des équations. (5.1), (5.3) et (5.4) à (5.6)

Les caractéristiques de vitesse-Torque et de Corque-Current d’un moteur excité séparément pour la tension de borne et le champ complet sont représentés sur la figure 5.3. La courbe de vitesse-Torque est une ligne droite.
La vitesse de charge sans charge ωm0 est déterminée par les valeurs de tension d’armature et d’excitation de champ. La vitesse diminue à mesure que le couple augmente et que la régulation de la vitesse dépend de la résistance du circuit d’armature (Eq. (5.10)). La baisse habituelle de la vitesse de la charge à pleine charge, en cas de moteur de taille moyenne,

est de l’ordre de 5%. Les moteurs excités séparément sont utilisés dans les applications nécessitant une bonne réglementation de vitesse et une vitesse réglable.
Moteur de la série:
Dans les moteurs de série, le flux est fonction du courant d’armature. Dans la région insaturée de caractéristique de magnétisation, φ peut être supposé proportionnel à l’IA. Ainsi,
![]()
Substituant dans les équations. (5.3), (5.4) et (5.5) donne
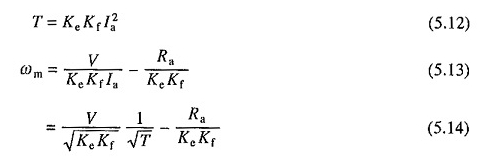
où la résistance au circuit de l’armature Ra est désormais la somme des résistances d’enroulement de l’armature et du champ. Les caractéristiques de vitesse-Torque et de Corque-Current d’un moteur série à la tension de borne nominale et à champ complet sont représentées sur la figure 5.3.
Les moteurs de la série conviennent aux applications nécessitant un couple de démarrage élevé et des surcharges de couple lourdes.
Étant donné que le couple est proportionnel au courant d’armature au carré, pour la même augmentation du couple, l’augmentation du courant du moteur est moindre par rapport à celle d’un moteur excité séparément où le couple est proportionnel au courant d’armature.
Ainsi, pendant les surcharges de couple lourdes et le démarrage, la surcharge de puissance sur la source et la surcharge thermique du moteur sont maintenues limitées à des valeurs raisonnables. Selon Eq. (5.14), car la vitesse varie inversement comme la racine carrée du couple, la machine fonctionne à grande vitesse à charge légère.
Généralement, la résistance mécanique d’un type de moteur à courant continu lui permet de fonctionner jusqu’à environ deux fois la vitesse nominale.
Par conséquent, le moteur de la série ne doit pas être utilisé dans les disques où il y a une possibilité que le couple de charge soit abandonné dans la mesure où la vitesse peut dépasser la valeur nominale deux fois.
Moteur composé:
Les caractéristiques de la vitesse-Torque et du Corque-Current d’un moteur de composé cumulé sont également représentées sur la figure 5.3. La vitesse sans charge dépend de la force du champ de shunt et de la pente de la caractéristique sur la force du champ série.
Les moteurs composés cumulatifs sont utilisés dans les applications où une caractéristique tombante similaire à celle d’un moteur en série est requise et en même temps, la vitesse de charge doit être limitée à une valeur sûre; Les exemples typiques sont les ascenseurs et les treuils.
Il est également utilisé dans les applications de charge intermittent, où la charge varie de presque aucune charge à des charges très lourdes. Dans ces applications, un volant peut être monté sur l’arbre du moteur pour l’égalisation de la charge.
En dehors de la charge d’égalisation sur l’alimentation, permet l’utilisation d’un moteur de plus petite taille. La machine à appuyer est un exemple typique de ce type d’application.
Les caractéristiques de la Fig. 5.3, qui sont obtenues à la tension de borne nominale et au champ complet, sont connues sous le nom de caractéristiques naturelles de la vitesse-couple. La vitesse nominale (ou pleine charge) est connue sous le nom de vitesse de base.
Moteur universel:
Le moteur universel peut fonctionner à la fois sur l’alimentation DC et AC. Il s’agit essentiellement d’un moteur de la série DC, avec quelques différences de construction; qui sont principalement introduits pour obtenir des performances satisfaisantes sur AC. Dans le moteur en série, le couple dépend du produit du courant d’armature et du flux de champ.
L’inversion de la tension du terminal inverse à la fois le courant d’armature et le flux de champ. Par conséquent, le couple reste dans la même direction. Par conséquent, lorsqu’il est nourri à partir d’une source CA, le moteur de la série produit un couple unidirectionnel.
Bien que le couple fluctue à une fréquence de 100 Hz entre zéro et sa valeur de crête, ses fluctuations sont lissées par l’inertie du moteur et le moteur fonctionne à une vitesse uniforme.
Un simple moteur de la série DC ne fonctionne pas bien sur AC. L’hystérésis et les pertes de courant de Foucault qui se produisent dans les pôles de champ et le joug réduisent l’efficacité du moteur et augmentent la charge thermique.
Le flux alterné produit de grands courants induits dans les bobines qui sont courtes par les pinceaux pendant la commutation. Cela provoque un étincelle excessive au commutateur. Le facteur de puissance du moteur est très médiocre en raison d’une grande inductance du champ et de l’armature.
Le moteur universel est spécialement construit pour résoudre ces limitations. En plus de l’armature, les poteaux de champ et les yokes sont également laminés pour réduire les pertes de courant de Foucault. La stratification à haute perméabilité en acier en silicium est utilisée pour réduire la perte d’hystérésis.
Un enroulement compensateur est utilisé en série avec l’armature pour réduire l’inductance de l’armature. L’inductance du champ est abaissée en utilisant moins de tours et de morceaux de poteau peu profond. Malgré ces changements, lorsqu’il est alimenté par AC, la commutation est pire que lorsqu’elle est nourrie de DC.
Par conséquent, leurs cotes de puissance sont rarement supérieures à 1 kW. Aucune vitesse de charge n’est élevée, mais généralement pas suffisamment élevée pour endommager le moteur.
La plupart des moteurs universels sont fabriqués pour une utilisation à des vitesses supérieures à 3000 tr / min. Il s’agit de la vitesse maximale d’un moteur à induction lorsqu’il est alimenté à partir d’une alimentation de 50 Hz. En dessous de cette vitesse, le moteur à induction est généralement préféré.
De nombreux moteurs universels fonctionnent à des vitesses jusqu’à 12 000 tr / min et peuvent aller jusqu’à 20 000 tr / min. En raison de vitesses de fonctionnement élevées, le moteur universel est beaucoup plus petit que pour une induction ou un moteur CC à basse vitesse d’une notation identique.
En raison des pinceaux et du commutateur, il nécessite un entretien fréquent et a une durée de fonctionnement relativement courte.
Jusqu’à récemment, le moteur universel était le moteur le moins cher capable de courir à grande vitesse et d’avoir un poids et une taille relativement très faibles.
Les types sans balais de moteur à courant continu ou un moteur à induction monophasé alimenté par un onduleur à fréquence variable peuvent devenir son concurrent dans un avenir proche.
Certaines applications de moteur universel sont des ventilateurs, des exercices électriques, des appareils électroménagers, etc.
Moteurs aimants permanents:
Dans les moteurs à courant continu de l’aimant permanent, l’excitation sur le terrain est obtenue en montant convenablement les aimants permanents sur le stator. Les aimants de ferrites ou de terres rares (samarium de cobalt) sont utilisées. Les ferrites sont couramment utilisées en raison du coût inférieur, mais la machine devient encombrante en raison de la faible rétivité.
Les terres rares en raison de leur haute rétivité permettent une grande réduction du poids et de la taille, mais elles sont très chères. Les moteurs aimants permanents sont principalement utilisés dans la gamme de puissances fractionnaires, mais ils sont disponibles jusqu’à 5 kW.
L’utilisation d’aimants permanents pour l’excitation élimine la perte de cuivre sur le terrain et le besoin d’offre sur le terrain. Par rapport aux moteurs des plaies sur le terrain, ils sont plus efficaces, fiables, robustes et compacts.
Le flux de champ reste constant pour toutes les charges donnant une caractéristique de couple de vitesse plus linéaire. Dans un moteur excité séparément, la défaillance de l’alimentation sur le terrain peut entraîner un état de fuite. Cela ne se produit pas dans les moteurs aimants permanents.
Comme le flux est constant dans ces moteurs, la vitesse ne peut pas être contrôlée au-dessus de la vitesse de base. Ces moteurs ont des applications dans des véhicules électriques comme des cyclomoteurs, des chariots élévateurs, des chaises roues, etc.
DC Servo Motors:
Il n’y a pas de ligne de partage nette entre le servo et la blessure conventionnelle sur le terrain et les moteurs DC aimant permanents.
Les servomoteurs sont destinés à être utilisés dans les systèmes de vitesse de boucle fermée et de contrôle de position où les exigences de performance sont telles qu’elles ne peuvent pas être obtenues par un moteur à courant continu normal. Un type normal de moteur CC est conçu pour obtenir de bonnes performances de charge complète avec un coût minimum.
Il ne fournit pas une bonne réponse dynamique et une précision en régime permanent lorsqu’elle est utilisée dans un lecteur en boucle fermée. Le servomoteur, d’autre part, est conçu pour atteindre de bonnes performances dynamiques et une précision en régime permanent.
Il est conçu pour obtenir les mêmes performances dans les deux directions de rotation, un rapport de couple / d’inertie élevé, un frottement faible et un couple sans ondulation lisse. Dans un type de moteur à courant continu, l’inertie d’armature est proportionnelle à la longueur et au diamètre au carré.
Dans certains servomoteurs, l’inertie est réduite en réduisant le diamètre et en augmentant la longueur pour la même note. Dans les fonctionnalités de faible puissance, où le contrôle du courant n’est pas incorporé, le courant pendant le fonctionnement transitoire peut être encore plus élevé que dix fois le courant nominal.
Le commutateur est conçu pour obtenir une commutation sans étincelle même dans des courants aussi importants, qui ne seront pas possibles dans un moteur courant commun. En raison de ces exigences exigeantes, les servomoteurs sont beaucoup plus chers que les moteurs CC courants.
Leurs notes peuvent être de quelques watts (dans des servos d’instruments) à Megha Watts (rouleaux en acier). Les petits servomoteurs sont généralement de type aimant permanent.
Moteurs de bobine en mouvement:
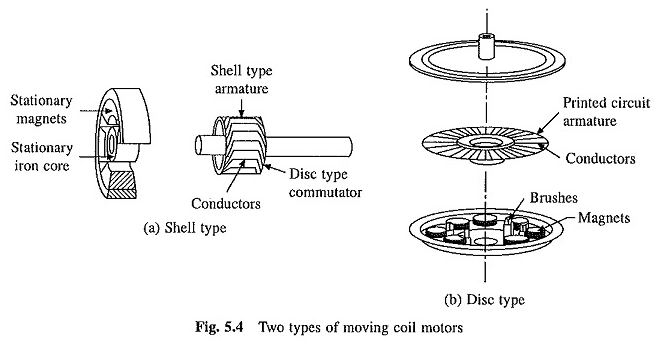
Certaines applications nécessitent une accélération beaucoup plus élevée que ce qui peut être réalisé dans un servomoteur CC conventionnel. Les armatures des moteurs à courant continu des bobines mobiles ont des constructions spéciales qui permettent une réduction substantielle de l’inertie armature et de l’inductance, permettant des accélérations très élevées. Deux types de moteurs de bobine en mouvement sont le type de coquille et de disque.
Type de shell:
Afin de maximiser l’accélération, l’inertie armature doit être minimisée.
Dans un moteur CC conventionnel, l’armature est constituée d’un enroulement logé dans des fentes fournies sur un cyclinder de matériau magnétique, qui est principalement prévu pour donner un chemin de réticence faible pour le champ du stator et tourne avec l’enroulement de l’armature. Par conséquent, l’armature a une inertie élevée.
Dans un moteur de bobine mobile de type shell (Fig. 5.4 (a)), le rotor se compose uniquement d’un enroulement en armature. Par conséquent, il a une très faible inertie. Un chemin de réticence faible pour le champ du stator est fourni par un cylindre de matériau magnétique stationnaire.
L’enroulement d’armature se compose de conducteurs assemblés pour former un cylindre à paroi mince. Le commutateur peut avoir une construction cylindrique comme dans les moteurs CC conventionnels ou la construction de types de disque.
De minuscules moteurs (avec des diamètres autour de 1 cm), appelés micromotors, ont un enroulement en armature composé de fils simplement vernies disposés sous forme cylindrique et d’un commutateur de type de disque. Ces moteurs sont largement utilisés dans les caméras, les lecteurs de cartes, les systèmes vidéo, etc.
Dans les moteurs de plus grande taille, l’enroulement de l’armature est fabriqué en liant les conducteurs ensemble à l’aide de résines polymères et de fibre de verre pour fournir une résistance mécanique adéquate.
Type de disque ou de crêpes:
Les détails de la construction sont illustrés à la figure 5.4 (b). L’armature est fabriquée sous forme de disque ou de crêpes, et les conducteurs d’armature ressemblent à des rayons sur une roue.
L’enroulement d’armature est formé en a-t-il tamponné les conducteurs à partir d’une feuille de cuivre, en les soudant ensemble et en les plaçant sur un disque léger. Les segments du conducteur sont ensuite joints à un commutateur au centre du disque.
Notez que la direction du flux est axiale et que le courant d’armature est radial. Ceci est juste opposé aux moteurs de type shell (ou conventionnels) où le courant est axial et le flux est radial. Le principe de fonctionnement est le même que celui d’un moteur à courant continu conventionnel.
Les moteurs de bobine mobile de type de disque sont plus robustes et disponibles en taille jusqu’à quelques kilowatts. Ils trouvent des applications où l’espace axial est à une prime comme les machines-outils, les disques, etc.
Les moteurs de bobine en mouvement peuvent être fournis avec un grand nombre de conducteurs (quelques centaines). Par conséquent, le couple reste presque constant à mesure que le rotor tourne. Cela leur permet de produire une rotation très fluide à basse vitesse.
L’absence de fer en armature du moteur de type disque élimine les pertes de noyau associées, ce qui la rend plus efficace que les moteurs CC conventionnels. Comme déjà indiqué, une faible inertie et une inductance à faible armature donne aux moteurs de bobine en mouvement une excellente réponse dynamique.
Moteurs de couple:
Les moteurs CC conçus pour fonctionner pendant de longues périodes dans une condition au point mort ou à basse vitesse sont appelés moteurs de couple. Un type normal de moteur CC est conçu pour optimiser les performances à pleine vitesse.
Dans les petites notes, le courant bloqué ou basse vitesse dans les moteurs CC normaux peut être de 5 à 10 fois le courant nominal. Si ces moteurs sont autorisés à fonctionner à basse vitesse (ou à l’arrêt), l’enroulement de l’armature sera brûlé par surchauffe et le commutateur sera endommagé en raison d’un lourdeur.
En cas de moteurs de couple, en raison de la conception spéciale, le courant bloqué et à basse vitesse reste en dessous de la valeur sûre. Certains moteurs de couple sont conçus pour fonctionner à basse vitesse par intermittence.
Les applications des moteurs de couple peuvent être divisées en trois catégories:
- Où le moteur doit fonctionner à l’état au point mort. Ici, le but du moteur est de développer une tension ou une pression requise sur un matériau, similaire au ressort. Les machines-outils, le spoulage relèvent de cette catégorie.
- Dans la deuxième catégorie, le moteur de couple est nécessaire pour se déplacer dans seulement quelques révolutions ou degrés de révolution. L’ouverture des vannes, des commutateurs et des dispositifs de serrage en est quelques exemples.
- Cette catégorie d’application implique un mouvement continu du moteur à basse vitesse, par exemple, le lecteur de bobine.