Contrôle de vitesse en boucle fermée du moteur CC:
Contrôle de vitesse en boucle fermée du moteur CC – Les convertisseurs (redresseurs et hélicoptères) sont construits à l’aide de dispositifs semi-conducteurs, qui ont une très faible capacité thermique. Par conséquent, leurs cotes de courant transitoires et stables sont les mêmes.
Les moteurs CC peuvent transporter 2 à 3,5 fois le courant nominal pendant les opérations transitoires de courtes durée, comme le démarrage, le freinage et l’inversion. Le courant est élevé, le couple est élevé et la réponse transitoire est plus élevée.
Par conséquent, lorsque une réponse rapide pendant les opérations transitoires est requise, le courant du moteur peut avoir une valeur maximale autorisée. La cote de convertisseur est ensuite choisie égale à la valeur maximale autorisée du courant du moteur.
En raison de la notation actuelle importante, le coût du convertisseur sera désormais plus élevé. Lorsque la réponse transitoire rapide n’est pas requise, la note de courant du convertisseur est choisie pour être égale à la cote de courant du moteur afin de maintenir le coût du convertisseur bas.
Les disques en boucle ouverte sont fournis avec un contrôle de limite de courant et afin de protéger le convertisseur contre les surcharges de courant.
Le contrôle de la vitesse de boucle fermée des schémas de moteur CC est fourni avec une boucle de commande de courant interne afin de limiter le courant dans une limite de sécurité et également d’accélérer et de décélérer le lecteur au courant maximal autorisé et au couple pendant les opérations transitoires.

Il convient toutefois de noter que la décélération au courant ou au couple maximum sera possible lorsque le convertisseur utilisé a également la capacité d’opération de freinage.
On peut en outre noter que le redresseur contrôlé sera utilisé lorsque l’approvisionnement est AC et que le hachoir sera utilisé lorsque l’alimentation est DC.
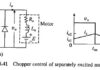
L’approche de base du contrôle de la vitesse en boucle fermée en dessous et au-dessus de la vitesse s’explique par le lecteur de la figure 5.47. Le lecteur utilise la boucle de contrôle du courant interne et la boucle de vitesse extérieure.
Un tel lecteur fonctionnera à un courant de champ constant et une tension d’interruption variable en dessous de la vitesse de base, et à une tension d’armature constante et un courant de champ variable au-dessus de la vitesse de base. L’armature et le champ sont donc alimentées par des redresseurs entièrement contrôlés.
Puisque, l’armature est alimentée par un redresseur entièrement contrôlé, le freinage avant n’est pas possible; Le lecteur va décélérer en raison du couple de charge uniquement. En raison du contrôle du courant interne avec le limiteur de courant, l’accélération aura lieu au courant et au couple maximum autorisés.
Dans le convertisseur semi-conducteur, Fed entraîne le contrôleur PI (proportionnel et intégral) est souvent utilisé car il filtre le bruit qui peut autrement devenir un problème. Le contrôleur PI donne également une bonne précision à l’état d’équilibre.

Examinons d’abord l’opération sous la vitesse de base. Dans la boucle de contrôle du champ, l’EMF E est comparé à une tension de référence E * qui est choisie pour se situer entre 0,85 et 0,95 de la tension armature nominale.
La valeur la plus élevée est utilisée pour les moteurs à faible résistance de circuit d’armature. Pour les vitesses en dessous de la vitesse de base, le contrôleur de champ sature en raison d’une grande valeur d’erreur EF. L’angle de tir du redresseur de champ αF est maintenu à zéro, en appliquant une tension nominale sur le terrain.
Cela garantit le courant de champ nominal pour le fonctionnement du moteur en dessous de la vitesse de base (ΩMB). Lorsque la référence de vitesse est augmentée de ω * m1 à ω * m2 (ω * m2 <ωm1) en raison d’une erreur de vitesse à grande vitesse, le limiteur de courant sature et définit la référence de courant à la valeur maximale autorisée.
Le lecteur accélère au courant et au couple maximum disponibles. Lorsque la vitesse atteint près de ω * m2, le limiteur de courant se désaturé et le conduite se règle à la vitesse ωm2 et au courant qui donne un couple moteur égal au couple de charge.
Si la référence de vitesse est réduite à Ω * M1, la référence de courant est définie à zéro et le lecteur se décélère en raison du couple de charge.
Lorsque ωm redevient légèrement inférieur à ω * m1 le courant du moteur s’écoule à nouveau et enfin entraîner des règles à la vitesse ωm1 et le courant pour lequel le couple moteur équilibre le couple de charge. Pour une erreur de vitesse négative, I * A est défini à zéro car le négatif i * a est sans usage.
Il facturera cependant le contrôleur PI. Lorsque la vitesse de référence augmente à nouveau, ce qui rend la vitesse à l’erreur positive, le contrôleur PI chargé prend plus de temps pour répondre, ce qui rend la réponse du transitoire plus lent.
Laissez maintenant examiner l’opération au-dessus de la vitesse de base. À proximité de la vitesse de base, le contrôleur de champ sort de saturation. Maintenant, si la vitesse de référence est définie pour une vitesse supérieure à la vitesse de base, la référence de courant est définie à la valeur maximale autorisée.
L’angle de tir du redresseur d’armature αA est réduit pour augmenter initialement VA. Le moteur accélère, E augmente, EF diminue, réduisant le courant de champ.
Ainsi, la vitesse du moteur continue d’augmenter et le courant de champ continue de diminuer jusqu’à ce que la vitesse du moteur devienne égale à la vitesse de référence. Puisque l’erreur de vitesse sera désormais petite, VA reviendra à une valeur proche de la valeur d’origine.
Ainsi, le contrôle de la vitesse au-dessus de la vitesse de base est obtenu par contrôle de champ avec la tension d’armature maintenue près de la valeur nominale. Dans la région de contrôle des champs (vitesse de base au-dessus), le lecteur réagit très lentement en raison de la grande valeur de la constante de temps de champ.