Contrôle du redresseur du moteur de la série DC:
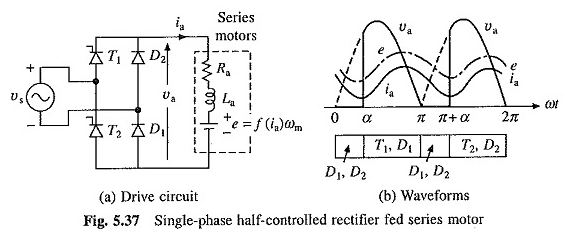
Le contrôle du redresseur à commande monophasée du moteur de la série DC est utilisé en traction. Un contrôle du redresseur à moitié contrôlé monophasé du moteur de la série DC est illustré à la figure 5.37 (a). Le circuit équivalent du moteur est également indiqué.
Étant donné que l’EMF arrière diminue avec le courant d’armature, la conduction discontinue ne se produit que dans une plage de fonctionnement étroite. Par conséquent, il sera négligé ici. Les formes d’onde de VA, IA et le dos de dos instantané pour la conduction continue sont représentées sur la figure 5.37 (b).
Bien que, à l’état d’équilibre, les fluctuations de vitesse soient négligeables, E n’est pas constant mais fluctue avec l’IA. Pour une vitesse donnée, E est lié à l’IA par courbe de magnétisation du moteur, qui est non linéaire en raison de la saturation. Ainsi


Le fonctionnement du moteur est décrit par les équations suivantes pour les intervalles de service et de roue libre respectivement, respectivement,


En raison de la présence du terme F (IA), Eqs. (5.103) et (5.104) sont des équations différentielles non linéaires et ne peuvent être résolues que numériquement. Une méthode d’analyse simple est obtenue lorsque E est remplacé par sa valeur moyenne EA de telle sorte que

où
Puisque la baisse à travers l’inductance LA en raison de la composante DC du courant d’armature IA est nul

Pour la conduction continue, VA pour les redresseurs monophasés à moitié contrôlés et entièrement contrôlés est donné par les équations. (5.93) et (5.83), respectivement.
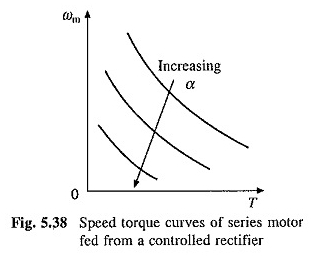
La séquence d’étapes suivante est utilisée pour calculer la caractéristique de la vitesse-couple pour un α donné en tenant compte non linéaire du circuit magnétique: une valeur est choisie pour l’IA. La valeur correspondante de KA est obtenue à partir de la caractéristique de magnétisation du moteur.
Pour la valeur connue de α, calculez VA à partir de l’équation. (5.93) ou (5.83), selon le circuit du redresseur utilisé. Maintenant, Ωm et T sont obtenus à partir d’EQS. (5.107) et (5.108), respectivement. La nature des caractéristiques de vitesse-couple pour le lecteur de la figure 5.37 (a) est représentée sur la figure 5.38.
Contrôle des moteurs HP fractionnaires:

En raison du redresseur contrôlé à demi-onde monophasé à faible coût de la Fig. 5.39 (a), l’utilisation d’un thyristor unique, est couramment utilisé pour le contrôle des moteurs CC universels Fractionnels HP, DC et des moteurs DC à aimant permanent. Ces disques sont utilisés dans les outils à main et les petits appareils domestiques.
La tension de la borne du moteur et les formes d’onde de courant d’armature pour le moteur universel sont représentées sur la figure 5.39 (b). Le lecteur fonctionne est une conduction discontinue avec un grand intervalle de courant zéro et une ondulation de courant importante.
Par conséquent, l’efficacité est mauvaise, la régulation de la vitesse est importante et la vitesse peut fluctuer autour de sa valeur moyenne lorsque l’inertie est faible. Parfois, une diode en roue libre est ajoutée pour réduire la durée de l’intervalle de courant zéro.
Les moteurs universels peuvent également être contrôlés par un contrôleur de tension AC TRIAC comme le montre la figure 5.40 (a). Le TRIAC est tiré sur α et (π + α). Maintenant, l’armature de la machine transporte le courant alternatif (Fig. 5.40 (b)).
En raison de la durée réduite de l’intervalle de courant zéro, le lecteur a des fluctuations de vitesse négligeables et une régulation de vitesse inférieure.