Contrôle du redresseur monophasé entièrement contrôlé du moteur CC:
Le contrôle du redresseur monophasé entièrement contrôlé du moteur CC est illustré à la figure 5.26 (a). Le moteur est indiqué par son circuit équivalent. L’alimentation sur le terrain n’est pas affichée. Lorsque le contrôle du champ est requis, le champ est alimenté à partir d’un redresseur contrôlé, sinon à partir d’un redresseur incontrôlé. La tension d’entrée CA est définie par

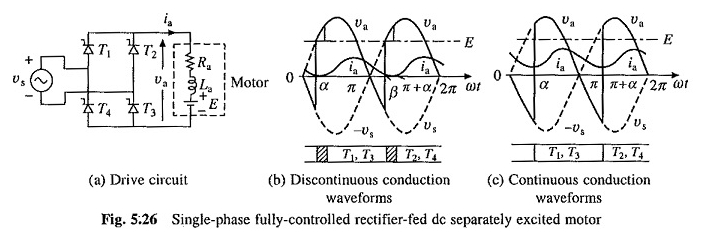

Dans un cycle de tension source, les thyristors T1 et T3 reçoivent des signaux de porte de α à π, et les thyristors T2 et T4 reçoivent des signaux de porte de (π + α) à 2π. Lorsque le courant d’armature ne coule pas en continu, le moteur fonctionne dans une conduction discontinue.
Lorsque le courant circule en continu, la conduction serait continue. Le lecteur considéré, fonctionne principalement dans une conduction discontinue. La conduction discontinue a plusieurs modes de fonctionnement.

La méthode d’analyse approximative, mais simple, est obtenue lorsque seul le mode dominant de conduction discontinue est pris en compte.

La tension de la borne motrice et les formes d’onde de courant pour les modes de conduction discontinue et de conduction continue dominants sont représentés sur les Fig. 5.26 (b) et (c).
En mode de conduction discontinue de contrôle du redresseur entièrement contrôlé monophasé du moteur CC, le courant commence à couler avec la mise en œuvre des thyristors T1 et T3 à ωt = α. Le moteur est connecté à la source et sa tension de borne est égale à Vs.
Le courant, qui coule contre les deux, E et la tension source après ωt = π, tombe à zéro à β. En raison de l’absence de désactivation de T1 et T3 actuelle. La tension de la borne motrice est désormais égale à sa tension induite E. Lorsque les thyristors T2 et T4 sont tirés à (π + α), le cycle suivant de la tension du terminal moteur VA commence.
Dans le mode de conduction continue du contrôle du redresseur monophasé entièrement contrôlé du moteur à courant continu, un courant positif circule à travers le moteur, et T2 et T4 sont en conduction juste avant α. L’application des impulsions de grille s’active sur les thyristors biaisés en avant T1 et T3 à α.
La conduction des biais inverses T1 et T3 T2 et T4 les désactive. Un cycle de VA est terminé lorsque T2 et T4 sont activés à (π + α) provoquant le désactivation de T1 et T3.
Étant donné que le courant d’armature n’est pas parfait DC, le couple du moteur fluctue. Étant donné que le couple fluctue à une fréquence de 100 Hz, l’inertie du moteur est capable de filtrer les fluctuations, ce qui donne une vitesse presque constante et un ripple E.
Conduction discontinue:
Dans un contrôle du redresseur monophasé entièrement contrôlé de la tension de la borne du moteur à courant continu VA, le lecteur fonctionne à deux intervalles (Fig. 5.26 (b)):
- Intervalle de service (α ≤ ωt ≤ β) lorsque le moteur est connecté à la source et VA = Vs.
- Intervalle de courant zéro (β ≤ ωt ≤ π + α) Lorsque Ia = 0 et Va = E.
Le fonctionnement du lecteur est décrit par les équations suivantes: 
Solution de l’équation. (5.72) a deux composants, l’un en raison de la source CA (VM / Z) SIN (ωt – φ), et d’autres en raison de l’EMF (- E / RA). Chacun de ces composants a à son tour un composant transitoire. Soit ceux-ci représentés par un seul exposant k1e-t / τa, puis

où

et τa est donné par Eq. (5.25).
K1 constant peut être évalué en soumettant l’équation. (5.74) à l’état initial Ia (α) = 0. Remplacer la valeur de K1 ainsi obtenue dans l’équation. (5.74) rende

Puisque ia (β) = 0, de l’équation. (5.77)

β peut être évalué par solution itérative de l’équation. (5.78).
Depuis la chute de tension à travers l’inductance de l’armature en raison de la composante CC du courant d’armature est nul
![]()
où VA et LA sont respectivement des composants DC de la tension et du courant d’armature respectivement. De la figure 5.26 (6)
Le courant d’armature se compose de composante DC IA et d’harmoniques. Lorsque le flux est constant, seul le composant CC produit un couple régulier. Les harmoniques produisent des composants de couple alternatifs, dont la valeur moyenne est nulle. Par conséquent, le couple moteur est toujours donné par l’équation. (5.7). Des équations. (5.7), (5.8), (5.79) et (5.80)

La frontière entre la conduction continue et discontinue est atteinte lorsque β = π + α. Substituant β = π + α dans Eq. (5.78) donne la valeur critique de la vitesse ωmc qui sépare la conduction continue de la conduction discontinue pour un α donné comme

Conduction continue:
De la figure 5.26 (c)

Des équations. (5.7), (5.8), (5.79) et

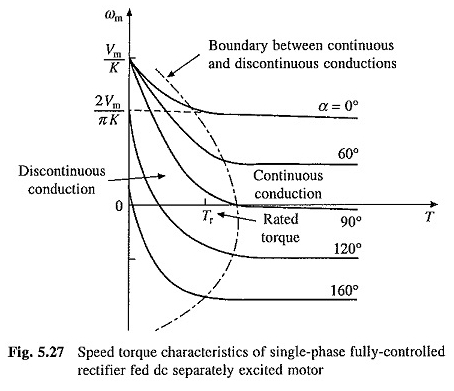
Les courbes de couple de vitesse pour le lecteur sont représentées sur la figure 5.27. L’opération idéale sans charge est obtenue lorsque Ia = 0. Lorsque les deux paires de thyristor (T1, T3) et (T2, T4) ne parviennent pas, IA sera nulle. Cela se produira lorsque E> vs tout au long de la période pour laquelle des impulsions fatiguées sont présentes.
Par conséquent, lorsque α <π / 2, E doit être plus grand ou égal à la VM et lorsque α> π / 2, E devrait être plus grand ou égal à VM sin ωt. Par conséquent, aucune vitesse de charge n’est donnée par

La tension de borne moyenne maximale (2VM / π) est choisie égale à la tension du moteur nominal. Idéal Aucune vitesse de charge du moteur lorsqu’il est alimenté par une tension directe parfaite de valeur nominale ne sera alors (2VM / πk).
Il est intéressant de noter que la vitesse maximale sans charge avec le contrôle du redresseur est (π / 2) fois cette valeur. La frontière entre la conduction continue et discontinue est représentée par ligne pointillée (Fig. 5.27).
Pour les couples moins que notés, un entraînement faible fonctionne principalement dans une conduction discontinue. Dans la conduction continue, les caractéristiques de vitesse-couple sont des lignes droites parallèles, dont la pente, selon (5.84), dépend de la résistance au circuit d’armature RA.
L’effet de la conduction discontinue est de rendre la réglementation de la vitesse pauvre. Ce comportement peut être expliqué à partir des formes d’onde des Fig. 5.26 (b) et (c). En conduction continue, pour un α donné, toute augmentation du couple fait chuter ωm et e pour que l’IA et T puissent augmenter.
La tension terminale moyenne VA reste constante. Dans la conduction discontinue, toute augmentation du couple et de l’augmentation accompagnée de l’IA entraînent une augmentation de la β et une baisse de l’AV. Par conséquent, la vitesse baisse d’une plus grande quantité.
Le lecteur fonctionne dans les quadrants I (automobile vers l’avant) et IV (freinage régénératif inversé). Ces opérations peuvent être expliquées comme suit:
De l’équation. (5.84), sous l’hypothèse de conduction continue, la tension de sortie CC du redresseur varie avec α comme le montre la figure 5.28 (a). Lorsque vous travaillez dans le quadrant I, ωm est positif et α ≤ 90 °; et les polarités de VA et E sont représentées sur la figure 5.28 (b).
Pour une IA positive, cela amène le redresseur à fournir de l’énergie et le moteur le consommer, donnant ainsi une automobile vers l’avant. Les polarités de E, IA et VA pour le fonctionnement du quadrant IV sont représentées sur la figure 5.28 (c). E a inversé en raison de l’inversion de ωm.
Étant donné que l’IA est toujours dans le même sens, la machine travaille comme un générateur produisant un couple de freinage. En outre en raison de α> 90 °, VA est négatif, ce qui suggère que le redresseur prend désormais le pouvoir des terminaux CC et le transfère en secteur AC.
Cette opération du redresseur est appelée inversion et le redresseur fonctionnerait comme un onduleur. Étant donné que l’alimentation générée est fournie à la source de cette opération, il s’agit d’un freinage régénératif.

Deux capacité de fonctionnement du quadrant du lecteur ne peuvent être utilisées qu’avec des charges de révision ou d’autres charges actives qui peuvent conduire le moteur dans le sens inverse.
Dans un fonctionnement normal à deux quadrants d’un moteur, on a besoin d’une manche directe (quadrant I) et d’un freinage vers l’avant (quadrant II) qui ne peut pas être fourni par le lecteur de la figure 5.26 (a).