Contrôleur de tambour pour le moteur de la série DC:
Les moteurs de la série DC sont souvent utilisés sur des grues, des ascenseurs, des tramways et d’autres applications, où le moteur est sous le contrôle direct d’un opérateur. Dans ces applications, un démarrage fréquent, des variations de vitesse, de l’arrêt et de l’inversion peuvent être nécessaires.
Un contrôleur manuellement exploité, plus robuste qu’un rhéostat de départ, appelé contrôleur de tambour, est employé.
Le contrôleur de tambour est sous la forme de tambour rotatif ayant des segments qui entre en contact avec les points fixes. Le contrôleur de vitesse de ce type est illustré à la Fig.

1.62 dans lequel K est une bobine de freinage d’arc: EM est un électromêne de freinage; FLS est un interrupteur de rotation dans une direction et RLS est un interrupteur pour la rotation dans le sens inverse. Le contrôleur de tambour a six positions pour l’avant et six positions pour la rotation inverse du moteur.
Les positions de travail du contrôleur sont représentées par des lignes pointillées verticales. L’EM électro-aimant est connectée en parallèle avec le moteur et libère le moteur au démarrage. Lorsque le moteur est déconnecté, il est freiné mécaniquement.

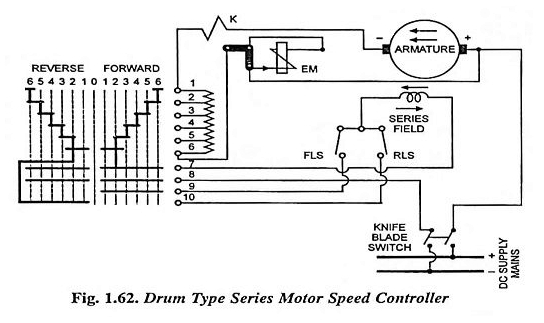

Maintenant, lorsque l’interrupteur de lame de couteau est fermé et que le contrôleur est placé en position vers l’avant 1, les connexions sont le long de la ligne verticale. Dans cette position, les segments établissent des contacts avec les points fixes 6 et 7, 8 et 9.
Dans cette position, le courant circule de la barre de bus + ve par l’enroulement en armature du moteur, la bobine de freinage d’arc K, toutes les résistances de démarrage 1-6, les points fixes 6 et 7 via des segments de contrôleur, l’enroulement de champ de la série, le commutateur de limite avant FLS, les points fixes 9 et 8 à travers les segments de contrôleur et le retour au bar de bus négatif.
Dans la deuxième position vers l’avant, les segments du contrôleur de tambour entrent en contact avec des points fixes 5 et 6, ce qui a ainsi mis en sorte une partie de la résistance de départ du circuit, de sorte que la vitesse du moteur de la série augmente.
Dans les positions de transfert suivantes, les 3e, 4e et 5e, des étapes supplémentaires des résistances de démarrage sont sorties du circuit et enfin en 6e position, toutes les résistances de départ sont courtes et le moteur atteint une vitesse maximale.
Dans les six positions vers l’avant, la direction du courant en armature ainsi que dans l’enroulement du champ en série est la même (de droite à gauche), comme le montre la figure 1.62.
Mais en première position inverse, le courant circule de la barre de bus + ve par l’enroulement de l’armature, la bobine de freinage de l’arc k, toutes les résistances de démarrage 1-6, les points fixes 6 et 10 via les segments de contrôleur, l’interrupteur de limite inverse RLS, l’enroulement de champ de la série, les points fixes 7 et 8 via les segments de contrôleur et revient à la barre de bus.
Par conséquent, il est évident que dans les positions d’inversion, la direction du flux de courant dans l’enroulement de l’armature reste inchangée, tandis que l’inverse à travers l’enroulement du champ de la série, inversant ainsi la direction de rotation du moteur.