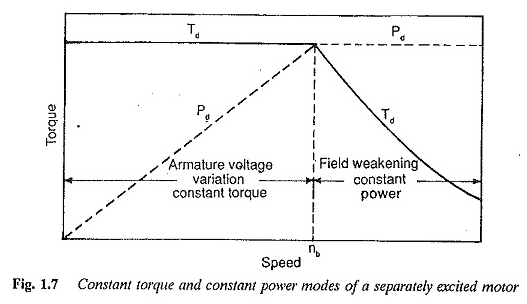
Motor de shunt DC à couple de vitesse:
La discussion précédente montre que la variation de la tension de l’armature donne des vitesses rampantes. La méthode rhéostatique simple fournit un moteur de shunt DC caractéristique du couple de vitesse avec peu de dureté et peu de stabilité.
Le contrôle de Ward Leonard (variation lisse de la tension), en revanche, produit une caractéristique plate avec une dureté et une stabilité raisonnables, mais un coût initial élevé. Une méthode simple avec un faible coût initial, pour obtenir des vitesses rampantes avec une dureté suffisante, est représentée sur la figure 1.8.
Le contrôle rhéostatique conventionnel avec une résistance en série avec l’armature est modifié en shuntant l’armature avec une faible résistance. En faisant varier les valeurs des séries et des résistances de shunt, les caractéristiques de vitesse-couple peuvent être conçues pour avoir la forme souhaitée.
Dans le contrôle rhéostatique simple en utilisant uniquement une résistance en série, la tension à travers l’armature à l’abri est de V. La vitesse à vide est décidée par V, quelle que soit la valeur de Rs. Si l’armature est shuntée par RSH, la tension à travers l’armature devient inférieure à V même sans charge.
La vitesse à vide diminue à la valeur souhaitée avec des valeurs appropriées de RS et RSH. Plus la valeur de RSH est petite, plus la tension est la tension à travers l’armature sans chargement. Finalement, la vitesse de non-charge diminue. La valeur de RSH est également efficace pour rendre le plat caractéristique.


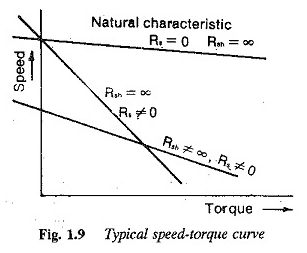
Les caractéristiques typiques de la vitesse-couple sont représentées sur la figure 1.9 dans lesquelles la caractéristique naturelle du moteur de shunt DC et la caractéristique avec un simple contrôle rhéostatique sont. Cette modification peut être utilisée si un fonctionnement stable à basse vitesse est requis. Il peut être utilisé pour l’arrêt précis du lecteur. En modifiant la valeur de RSH, la vitesse peut être réduite à une valeur très faible, et le freinage mécanique approprié peut être appliqué pour avoir une arrêt précis. 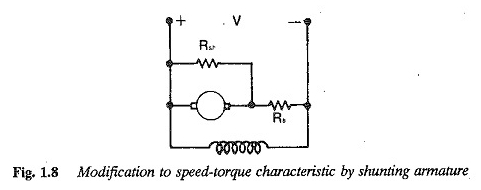
Se référant à la figure 1.8, nous avons 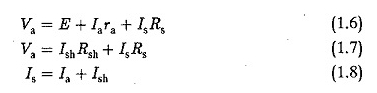
En utilisant ces équations, nous avons

Également à partir des équations (1.8) et (1.7)

En utilisant ces relations dans l’équation. (1.6) Nous avons

Substituant à / a en termes de TD, nous avons

La caractéristique de vitesse-Torque est représentée sur la figure 1.9. Les points suivants sont clairs à partir de la figure:
1.La vitesse de charge (TD = 0) diminue à 
comme la valeur de 
La valeur de RSH est inférieure, cette valeur est plus petite. La pente diminue également si RSH est petite. La dureté est ainsi améliorée et un fonctionnement stable est assuré par rapport au simple contrôle rhéostatique.
2.Les lisses du contrôle de la vitesse dépend de la façon dont RSH et RS sont variés. Le contrôle de la vitesse est étonné, car les résistances peuvent varier dans un marin étalé.
3.Cavage en dessous de la vitesse de base est possible. La vitesse à vide elle-même change après les variations de RSH. Une baisse nette de la vitesse à vide peut être observée lorsque la RSH est diminuée. Le contrôle de la vitesse est obtenu en faisant varier la valeur de Rs.
La méthode équivaut à rendre le champ plus fort et donne des résultats similaires à ceux obtenus en augmentant le courant de champ à un courant d’armature donné.
4.La méthode convient aux charges de couple constantes, de sorte que le courant d’armature est à sa valeur nominale.
5.La méthode convient si l’arrêt précis est
6. Ce n’est pas économique pour un fonctionnement continu. Les pertes en RSH et RS rendent le système inefficace. La méthode peut être utilisée si des vitesses de rampe stables sont nécessaires pour de courtes périodes.