DC -Motorübertragungsfunktion, die durch die Verstärkung gesteuert wird:
Die Geschwindigkeit eines Gleichstrommotors kann durch Variation der auf den Rahmen eines Gleichstrommotors aufgetragenen Spannung gesteuert werden. Ein angeregter Gleichstrommotor mit einer variablen Verstärkungsspannung findet die Anwendung als Antriebsmotor in einem variablen Geschwindigkeitsspieler.
Die variable Verstärkungsspannung wird durch einen kontrollierten Gleichrichter in der Phase geliefert. Das Diagramm einer durch Verstärkung gesteuerten CC -Motorübertragungsfunktion ist in Abbildung 6.7 dargestellt.
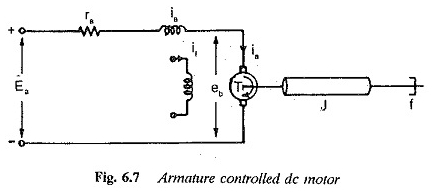

Das vom CC -Motor entwickelte Drehmoment
![]()

Oder

Φ ist ein Fluss des Luftraums
IA ist ein Verstärkungsstrom
K ist eine Konstante
Wenn wir die Auswirkungen der Sättigung und Reaktion der Reaktion nachlässt, haben wir den Fluss des Luftraums proportional zum Feldstrom. Es ist ![]()
Denn wenn das entwickelte Paar gegeben wird von
![]()
Wo KT der konstante Motor ist. Die EA -Verstärkungsspannung wird vom Thyristor -Wandler geliefert. Die Gleichung des ungewöhnlichen Schaltkreises ist gegeben durch 
EB in Gl. 6.7 ist die im Rahmen induzierte EMF -Rotations (hinten) und ist proportional zum Produkt- und Durchflussprodukt. Der Motorfluss ist jedoch konstant. Folglich kann die dynamische Motorgleichung, die das Gleichgewicht des Drehmoments angibt, geschrieben werden 
Unter der Annahme, dass die Anfangsbedingungen Null sind, können die Transformationen des Laplace von Gleichung 6.7, 6.8 und 6.9 als geschrieben werden

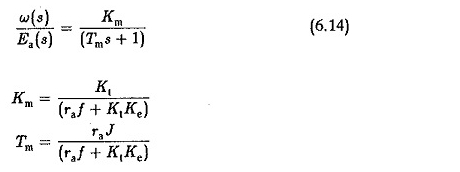
Wenn Sie EA (s) als Eingang und W (s) als Ausgabe einnehmen, kann die Übertragungsfunktion W (s) / EA (s) erhalten werden

Das in Abbildung 6.8 (a) angegebene Blockdiagramm repräsentiert die Gleichung. 6.13. Dies kann letztendlich auf einen einzelnen Block reduziert werden, der in Abbildung 6.8 (b) angegeben ist.
Normalerweise ist die Induktivität der Verstärkung sehr klein und kann vernachlässigt werden. Die Übertragungsfunktion in diesem Fall wird durch gegeben
Wir können sehen, dass der hintere EMF die Dämpfung des Systems beeinflusst. Eine Übertragungsfunktion zwischen Geschwindigkeit und Lastdrehmoment kann abgeleitet werden, indem angenommen wird, dass der andere EA -Eingang Null ist. In diesem Fall wäre die dynamische Gleichung
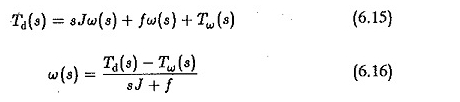
Aber aus den Gleichungen 6.10 und 6.11 haben wir

Ersetzen der Gleichung. 6.15 und vereinfachen Sie, dass wir erhalten


wo k konstant ist. Wenn die Pole dieser Übertragungsfunktion komplexe Konjugate sind, ist die Geschwindigkeitsänderung für eine Änderung des Lastdrehmoments oszillatorisch.
