Starten und Kontrolle der Geschwindigkeit der Traktionsmotoren CC:
Starten und Kontrolle der Geschwindigkeit von CC -Traktionsmotoren – Wie bereits erläutert, eignen sich nur komponierte Serien und DC -Motoren für Traktionsarbeiten.
Traktionsmotor – traktionsmotoren
Mit einem DC -Serie -Motor kann der Strom und das Drehmoment durch Stärkung des Feldes oder die Senkung der Spannung des Klemmens oder beides verringert werden. Die Motoren können in Reihe platziert werden, wodurch die Klemmenspannung von jedem ohne Verlust des externen Widerstands reduziert werden.
Der externe Widerstand kann in Reihe mit den Motoren platziert werden, um den Startstrom auf jeden gewünschten Wert zu beschränken. Durch Variieren des Widerstandes kann der Strom während der gewünschten Hämmerzeit konstant gehalten werden, da die hintere EMF im Konstruktion befindet.
Da das maximale Drehmoment beim Starten einen vollständigen Widerstand auf dem Boden erfordert, wird bei Startup im Allgemeinen ein Anschluss von Shunt oder reduziertem Feld abgelehnt.
Mit dem DC -Verbindungsmotor kann der Start mit einem vollständigen Verstärkungsstrom in der Serie der Serie und dem maximalen Strom in Shunt -Feldspulen hergestellt werden.
Ein in den Verstärkungskreis eingeführter Start -up -Widerstand wird in Stufen reduziert, bis das Rahmen und das Feld der Serie über die Linie angeschlossen sind.
Eine Erhöhung der zusätzlichen Geschwindigkeit wird durch die Reduzierung des Shunt -Feldstroms in Schritten bis zu dem Punkt beeinflusst, an dem die Wicklung des Shunt -Feldes getrennt ist und die Aktion dann mit der eines einfachen Standardmotors identisch ist.
Verschiedene Methoden zum Starten und Kontrolle von DC -Traktionsmotoren werden nachstehend erörtert.
1. Rheostatische Kontrolle
Eine Serie in Serie kann mit dem Anschließen eines externen Widerstandes (Starter) in Serie mit dem Hauptmotorenkreis angeschlossen werden.
Da der vom Motor entwickelte Heck -EMF null ist, ist der mit dem Motor angeschlossene Widerstand daher maximal und hat einen solchen Wert, dass die Spannung mit einem Volllaststrom gleich der Leitungsspannung ist.
Wenn sich der Motor beschleunigt, wird der vom Motor entwickelte hintere EMF zunimmt. Daher wird der externe Widerstand allmählich reduziert, um den konstanten Strom während des gesamten Start- oder Beschleunigungszeitraums aufrechtzuerhalten.
Die Grundschaltung der Traktion Motor mit rheostatischer Start ist in Abbildung 13.1 dargestellt. Bei dieser Methode gibt es einen erheblichen Energieverlust in der externen Schaltung.
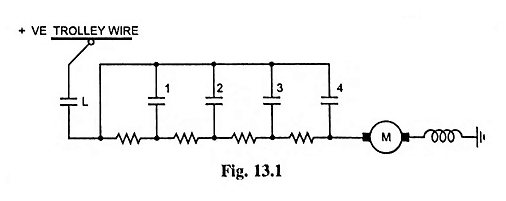
Die verwendeten Widerstände sind für die kurzfristige Bewertung und nicht für die kontinuierliche Bewertung ausgelegt, da sie zum Transport des Stroms nur beim Starten der Motoren erforderlich sind. Der Motor kann daher nur ein Geschwindigkeitsmerkmal haben.
2. Parallele Kontrolle der Serie
Der Hauptnachteil von elektrischer Energie in der rheostatischen Kontrolle wird bei dieser Methode teilweise überwunden, wenn zwei oder mehr Motoren vorhanden sind.

Bei zwei Motoren sind die Motoren zunächst in Reihe miteinander verbunden und ein Start- oder Kontrollwiderstand, wie in Abbildung 13.2 (a) dargestellt.
Der zusätzliche Widerstand wird durch den Controller allmählich geschnitten, wenn die Motoren die Geschwindigkeit erreichen und schließlich der Kontrollwiderstand vollständig entfernt wird. Anschließend hat jeder Motor die Hälfte der Spannung der Linie durch sie, wie in Abbildung 13.2 (b) gezeigt. Dies ist die erste laufende Position.
In dieser Position für einen gegebenen Wert des Verstärkungsstroms arbeitet jeder Motor bei der Hälfte seiner normalen Geschwindigkeit.
Da es keinen externen Widerstand in der Schaltung gibt, gibt es keinen Energieverschwendung, und daher arbeiten die Motoren mit einer Effizienz, die fast dem verfügbar ist, mit einer vollständigen Leitungsspannung am Klemme jedes Motors.
Im nächsten Schritt sind die beiden Motoren parallel und in Serie mit einem variablen Widerstand R an verbunden, wie in Abbildung 13.2 (c) gezeigt.
Dieser Widerstand wird allmählich geschnitten, wenn die Motoren die Geschwindigkeit erreichen, und schließlich wird dieser Widerstand vollständig aus der Schaltung entfernt, wie in Abbildung 13.2 (d) dargestellt, die zweite Rennposition wird erhalten.
In dieser Position wird jeder Motor über die komplette Leitungsspannung angeschlossen. Ein Verbindungsdiagramm, das die Schaltsequenz veranschaulicht, ist in Abbildung 13.3 angegeben.

3. Feldkontrolle.
Da die Motordrehzahl umgekehrt proportional zum Fluss ist (unter der Annahme einer Linienspannungskonstante), kann die Geschwindigkeit daher variieren, indem der Durchfluss variiert.
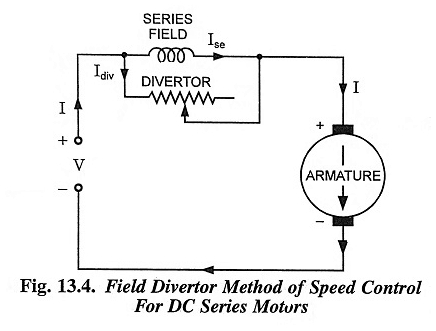
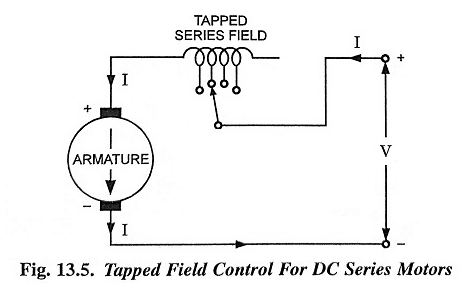
Im Fall von Serienmotoren kann der Fluss variiert werden (i) durch Verbinden eines variablen Widerstands, der parallel zur Wickelung der Serie der Serie (siehe Abbildung 13.4) oder (ii) durch Schneiden einiger der Kurven im Feld der Serie (siehe Abbildung 13.5) verbindet (siehe Abbildung 13.5).
Da in beiden Fällen der Durchfluss nur verringert werden kann, wird diese Methode als Feldschwächungsmethode bezeichnet und die Geschwindigkeiten größer als normal können erhalten werden.
Nach dieser Methode kann die Geschwindigkeit aufgrund der aus Traktionsmotoren verursachten Konstruktionsschwierigkeiten um 15 bis 30% der normalen Geschwindigkeit erhöht werden.
Die Methode zur Schwächung des Feldes ist für Abflugzwecke ohne Verwendung. Diese Methode wird verwendet, um die Geschwindigkeit der Traktionsmotoren auf 10 oder 15% zu erhöhen, wenn sie durch das parallele Steuerungssystem der Serie eine maximal mögliche Geschwindigkeit erreicht haben. Der Vorteil dieses Systems besteht darin, dass es die Flexibilität des Zugmittels erhöht.
Zum Beispiel für den Stadtservice ist die erforderliche Geschwindigkeit niedrig und häufiger Starten und Stoppen sind erforderlich. Die Ausrüstung kann mit dem gesamten Feld arbeiten.
Wenn das gleiche Fahrzeug für Vorstädten und Städten verwendet werden muss, bei denen höhere Geschwindigkeiten erforderlich sind, wäre eine Änderung des Geschwindigkeitsverhältnisses erforderlich. Unter Verwendung der Geschwindigkeitskontrollfeldmethode muss die Geschwindigkeitsverhältnis geändert werden.
Somit kann eine Art von Geräten verwendet werden, um verschiedene Arten von Dienstleistungen mit angemessenem Energieverbrauch zu betreiben.
4. Steuerung der Motorgenerator -Lokomotive
Der gesamte Motorgenerator besteht im Allgemeinen aus einem monophronischen synchronen Motor, der ein oder zwei CC -Generatoren und einen Excitator auf demselben Baum führt. Das Set wird im Allgemeinen durch einen Startmotor gestartet und hervorgehoben und automatisch synchronisiert, wenn er Geschwindigkeit erreicht.
Die Generatorspannung wird durch Kontrolle des Feldes vom Excitator reguliert. Daher ist in der Zeichnungsschaltung der Traktion Engine kein Widerstand erforderlich, oder die parallele Steuerung der Serie ist erforderlich, um wirtschaftliche Funktionsgeschwindigkeiten zu erhalten oder Rheostatverluste bei der Kontrolle des Traktionsmotors zu sparen.
Eine parallele Anordnung in Serien wird manchmal verwendet, um die Größe und das Gewicht des Generators zu sparen.
5. Steuerung der elektrischen Diesel -Lokomotive
Wie bereits erwähnt, hat die Diesel Electric Lokomotive in den letzten Jahrzehnten wichtig geworden und hat die Dampflokomotive in vielen Regionen der Welt weitgehend ersetzt.
Hauptsächlich ein Diesel-Elektro-Player, wie sie auf der Lokomotive verwendet wird, ist ein autonomes Stromumrechnungssystem, bei dem eine Dieselmotor über einen CC-Generator, den er funktioniert, Strom für Traktionsmotoren anbietet.
Somit gibt es drei grundlegende Teile in der Diesel -Lokomotive, nämlich den Dieselmotor, den DC -Generator und die Traktionsmotoren der DC -Serie.
Der Dieselmotor führt zum Generator und der Generator bietet eine CC -Stromversorgung für Traktionsmotoren, die wiederum die Leistung des Musters zum Fahren des Fahrzeugs ausschüttet. Das Generatorfeld ist indirekt von einer Batterie angeregt, deren Spannung durch einen Rheostat variieren kann.
Die Batteriespannung variiert wiederum die Spannung eines Hilfsregers oder eines Amplidyne, was den Hauptgenerator erregt.
Die Generatorspannung ist daher unter Kontrolle, und diese Steuerform macht unnötige Widerstandsnetze in den Hauptmotorschaltungen, um die Traktionsmotoren zum Starten und Beschleunigen zu schützen.
Die Motordrehzahl wird normalerweise von einem Lastregler gesteuert, der den Motor als Funktion der Steuerung eingereicht wird.
Dieser Regler hält automatisch einen konstanten Ausgang bei, da der Regler die Anregung des Feldes reduziert und somit den gewonnenen Motor verhindert, wenn der Motor mehr Kraftstoff als für die Einstellung benötigt. Es gibt verschiedene Arten von Dieselmotorsteuerung, aber alle folgen diesem Prinzip.