Drives de moteur CC sans balais (PMAC trapézoïdal):
La section transversale d’un moteur à courant continu à 2 pôles à 2 pôles à 2 pôles est représentée sur la figure 7.15. Il a un rotor aimant permanent avec un arc à pôle large. Le stator a trois enroulements de phase concentrés, qui sont déplacés de 120 ° et chaque enroulement de phase s’étend sur 60 ° de chaque côté.
Les tensions induites en trois phases sont représentées sur la figure 7.17 (a). La raison de l’obtention des formes d’onde trapézoïdales peut maintenant être expliquée. Lorsque vous tournez dans le sens dans le sens antihoraire, jusqu’à 120 ° rotation de la position illustrée à la Fig.
7.15, tous les conducteurs supérieurs de la phase A lieront le pôle Sud et tous les conducteurs inférieurs de la phase A lieront le pôle Nord. Par conséquent, la tension induite dans la phase A sera la même pendant la rotation de 120 ° (Fig. 7.17 (a).

Au-delà de 120 °, certains conducteurs dans le pôle nord de la liaison supérieure et d’autres le pôle Sud. La même chose se produit avec les conducteurs inférieurs. Par conséquent, la tension induite dans la phase A inverse linéairement dans la rotation des 60 ° suivants. Le reste de la forme d’onde de la phase A et les formes d’onde des phases B et C peuvent être expliqués de la même manière.


Un moteur PMAC trapézoïdal nourri en onduleur fonctionnant en mode auto-contrôlé est appelé moteur CC sans balais.
Motor DC sans balais pour les applications de servo:
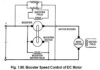
Un moteur à courant continu sans balais en utilisant un onduleur de source de tension (VSI) et un moteur PMAC trapézoïdal est illustré à la figure 7.16 (a).
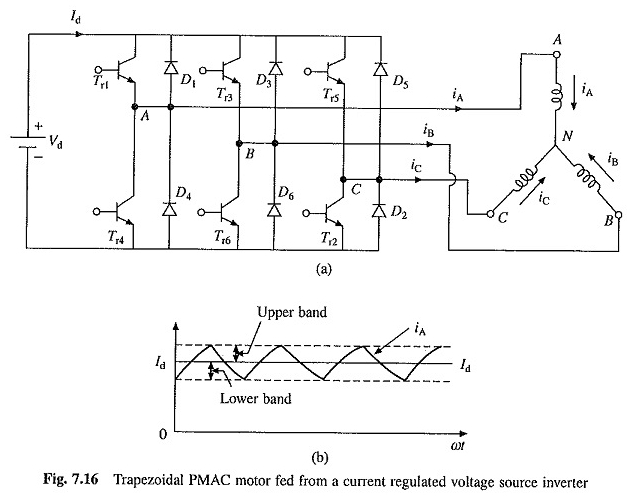
Les enroulements du stator sont connectés aux étoiles. Il aura des capteurs de position de rotor, qui ne sont pas illustrés sur la figure. Les formes d’onde de tension de phase pour un moteur PMAC trapézoïdal sont représentées sur la figure 7.17 (a). Que les enroulements du stator soient nourris avec des impulsions de courant représentées sur la figure 7.17 (b).
Les impulsions de courant sont chacune de 120 ° et sont situées dans la région où la tension induite est constante et maximale. De plus, la polarité des impulsions de courant est la même que celle de la tension induite. Étant donné que le flux d’air-gap est constant, la tension induite est proportionnelle à la vitesse du rotor.
![]()
Au cours de chaque intervalle de 60 ° sur la figure 7.17, le courant entre une phase et sort d’une autre phase, donc, l’alimentation fournie au moteur dans chacun de ces intervalles ![]()
Couple développé par le moteur

La forme d’onde du couple est donnée sur la figure 7.17 (c). Selon Eq. (7.31) Le couple est proportionnel à l’ID actuel. On peut afficher qu’un ID de courant CC circule dans la liaison CC. L’opération de freinage régénérative est obtenue en inversant les courants de phase.
Cela inversera également l’ID de courant source. Maintenant, la puissance passe de la machine à l’onduleur et de l’onduleur à la source DC. Lorsque la vitesse est inversée, la polarité des tensions induites s’inverse. Avec la polarité actuelle illustrée à la Fig.
7.17, le lecteur donne un opération de freinage régénératif et lorsque la direction actuelle est inversée, un fonctionnement de l’automobile est obtenu. Les formes d’onde actuelles montrées sur la figure 7.17 (b) sont produites comme suit.
Pendant la période 0∘ à 60∘, IA = ID et IB = –ID. L’IA actuel entre par la phase A et part à travers la phase B. Lorsque les transistors TR1 et TR6 sont ON, les bornes A et B sont respectivement liées aux bornes positives et négatives de la source Vd de la source DC.
Un courant circulera à travers le chemin composé de Vd, TR1, Phase A, Phase B et TR6 et le taux de changement de courant IA sera positif. Lorsque TR1 et TR6 sont désactivés, ce courant circulera à travers un chemin composé de phase A, phase B, diode D3, Vd et diode D4.
Étant donné que le courant doit circuler contre la tension VD, le taux de variation de l’IA sera négatif. Ainsi, en activant et en éteignant alternativement la phase TR1 et TR6, le courant A peut être fait pour suivre l’ID de courant de référence dans une bande d’hystérésis comme le montre la figure 7.16 (b). En réduisant la bande suffisamment, presque un courant CC de valeur souhaitée peut être produit.
L’opération pour les autres intervalles de 60 ° peut être expliquée de la même manière. Pour placer correctement les impulsions de courant par rapport aux tensions induites ou l’identification de ces soixante intervalles, des signaux sont générés par des capteurs de position de rotor.
Dans les six positions angulaires du rotor, doivent être détectées par cycle de la tension induite. Les capteurs d’effet Hall peuvent détecter l’ampleur et la direction d’un champ magnétique. Par conséquent, trois capteurs à effets de salle peuvent détecter les six positions du rotor.
Les capteurs sont montés à 60 ° d’intervalle électrique et alignés de manière appropriée avec l’enroulement du stator. Des capteurs optiques sont également disponibles. Les capteurs utilisés avec le moteur PMAC trapézoïdal sont moins chers par rapport à ceux requis avec le moteur PMAC sinusoïde.
Étant donné que le moteur trapézoïdal est également moins cher, le lecteur a un coût beaucoup plus faible. Bien que la réponse dynamique soit comparable, l’ondulation de couple est considérablement plus élevée dans ce lecteur.
L’ondulation de couple est causée en raison de la tension induite que la tension n’est pas exactement trapézoïdale et l’incapacité des onduleurs à produire des formes d’onde de courant rectangulaire.
Le lecteur PMAC trapézoïdal est largement utilisé dans les entraînements de servo, sauf dans les disques hautes performances où le lecteur de moteur PMAC sinusoïdal est préféré.
Il existe un grand nombre de similitudes entre le moteur PMAC trapézoïdal nourri à l’onduleur et un moteur à courant continu. Comme un moteur à courant continu, la tension induite est proportionnelle à la vitesse [Eq. (7.30)], le couple est proportionnel au courant d’armature [Eq.
(7.31)], et les champs de stator et de rotor restent stationnaires les uns par rapport aux autres. Cependant, il n’a pas de brosses et d’inconvénients associés, donc le moteur PMAC trapézoïdal nourri à l’onduleur est communément appelé moteur CC sans balais.
Ce moteur est également conçu comme un moteur à courant continu commuté électroniquement, car l’onduleur remplit ici la même fonction que les pinceaux et le commutateur dans un moteur à courant continu, c’est-à-dire
pour déplacer les courants entre les conducteurs d’armature pour garder le stator et les champs de rotor stationnaires (et en quadrature) les uns par rapport aux autres.
Drives de moteur CC sans balais à faible coût:
L’un des points importants concernant les lecteurs de moteur CC sans balais est que par intégration du convertisseur / onduleur avec moteur, le lecteur est considérablement simplifié, entraînant un contrôle plus simple et une réduction substantielle du coût.
Alors que les machines triphasées sont utilisées dans les applications majoritaires, des machines monophasées et quatre phases sont également utilisées. De même, une grande variété de convertisseurs / onduleurs sont utilisés.
Les moteurs sont alimentés par des impulsions de courant et également par des impulsions de tension avec une limite de courant uniquement pour s’assurer que le courant ne dépasse pas les cotes du convertisseur et du moteur. Deux de ces lecteurs sont décrits ci-dessous.

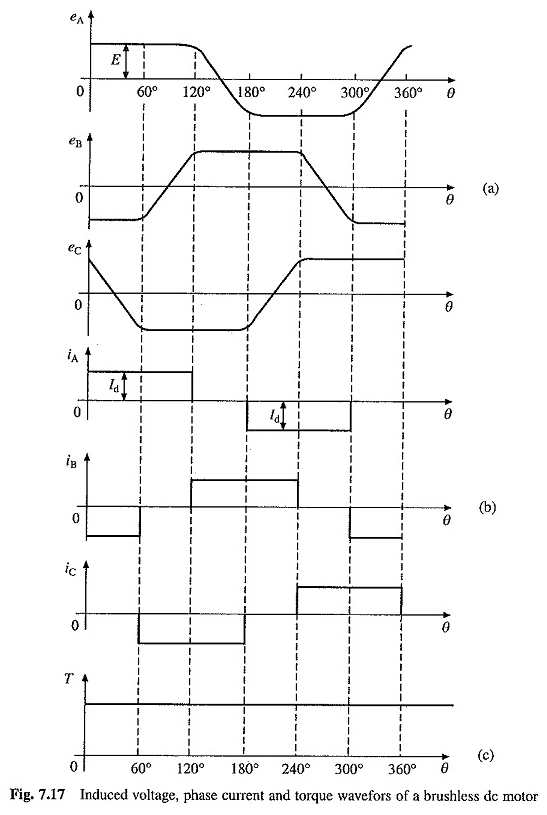
Un entraînement à faible coût utilisant un moteur PMAC trapézoïdal en trois phases est illustré à la figure 7.18. Il n’utilise que trois transistors et trois convertisseurs de diode, qui ne peuvent fournir que des courants ou des tensions positifs à trois phases motrices.
Les tensions induites et le courant fournies pour les opérations de automobilisation et de freinage sont représentés sur la figure 7.19. Lorsque des impulsions de courant positif à 120 ° comme indiqué sur la figure 7.19 (b) sont fournies au moteur, le fonctionnement de la conduite est obtenu dans le sens antihoraire.
Lorsque ces impulsions sont décalées de 180 °, comme le montre la figure 7.19 (c), le fonctionnement de freinage est obtenu. Les opérations de automobilisation et de freinage pour la rotation dans le sens horaire sont obtenues en synchronisant les impulsions comme indiqué sur la figure 7.19 (c) et (b), respectivement. Chaque phase est essentiellement fournie par un hélicoptère.
Le courant de phase NA est contrôlé par TR1 et D1. Lorsque TR1 est sur la source, le VD est connecté à travers l’enroulement NA et le taux de variation de l’IA est positif. Lorsque TR1 est désactivé, les roues libres IA actuelles à travers la diode D1 et le taux de variation de l’IA sont négatives.
Ainsi, pendant la période de 0 ° à 120 °, TR1 peut être alternativement activé et désactivé afin que le courant IA soit fait pour suivre un courant de référence rectangulaire I * A dans une bande d’hystérésis.
Par rapport au lecteur de la figure 7.16, le couple produit par ce lecteur pour une valeur donnée d’ID sera la moitié, donnant une réponse dynamique plus lente. Le lecteur a également une ondulation de couple plus élevée.
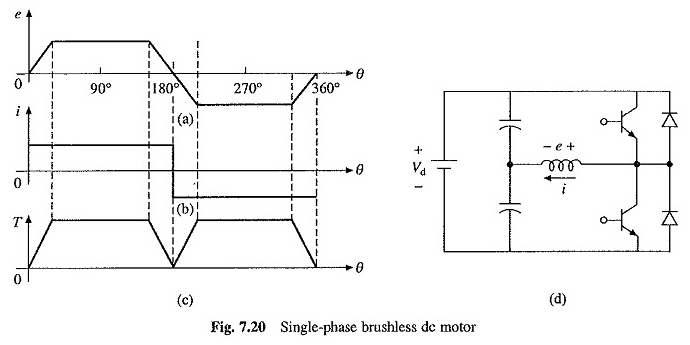
Examinons également les entraînements de moteur à courant continu monophasé. Laissez le moteur a un pôle large est comme indiqué sur la figure 7.15 et un enroulement à phase concentrée unique avec une propagation de 60 ° de chaque côté.
Soit θ mesuré à partir de l’instant lorsque l’axe de la phase coïncide avec l’axe du poteau de rotor, puis la tension induite dans l’enroulement de phase aura la forme d’onde comme le montre la figure 7.20. Soit le moteur à fournir à partir d’un convertisseur monophasé de demi-pont illustré à la Fig.
7.20 (d) avec une forme d’onde de courant rectangulaire montré sur la figure 7.20 (6). Ensuite, le couple produit par le moteur aura une forme d’onde illustrée à la figure 7.20 (c).
Bien que le couple ait une grande ondulation, lorsqu’il fonctionne à grande vitesse, l’ondulation de couple sera filtrée par l’inertie du système de charge moteur, donnant une vitesse uniforme.
Caractéristiques et applications importantes:
En raison de l’absence de brosses et de commutateurs, les entraînements de moteur à courant continu sans balais présentent un certain nombre d’avantages par rapport aux moteurs CC conventionnels.
Ils ne nécessitent pratiquement aucun entretien, ont une longue durée de vie, une forte fiabilité, une faible inertie et une frottement et une faible interférence radiofréquence et un bruit.
En raison de faible inertie et de frottement, ils ont une accélération plus rapide et peuvent être exécutés à des vitesses beaucoup plus élevées – jusqu’à 100 000 tr / min et sont plus courantes. Parce que les enroulements d’armature sont sur le stator, le refroidissement est bien meilleur, c’est-à-dire que des sorties spécifiques plus élevées peuvent être obtenues.
Ces moteurs ont une efficacité élevée, dépassant 75% tandis que les moteurs à champ des plaies de faibles cotes de puissance ont une efficacité beaucoup plus faible. Les inconvénients par rapport aux moteurs CC conventionnels sont un coût élevé et un couple de démarrage faible. La taille d’un moteur CC sans balais est presque la même que le moteur CC conventionnel.
Les lecteurs de moteur CC sans balais trouvent des applications à leur tour des lecteurs de table dans les lecteurs d’enregistrement, le lecteur de bande pour les enregistreurs vidéo, les lecteurs de broche dans les disques durs pour les ordinateurs et les disques à faible coût et à faible puissance dans les périphériques informatiques, les instruments et les systèmes de contrôle.
Ils ont également des applications dans les champs de l’aérospatiale, par exemple des moteurs de gyroscope et des refroidisseurs cryogéniques biomédicaux et des pompes cardiaques artificielles. Ils sont également utilisés pour conduire des ventilateurs de refroidissement pour les circuits électroniques et les dissipateurs de chaleur.