Équation de couple du moteur à courant continu:
Lorsque la tension CC est appliquée à l’armature d’un moteur à courant continu avec son champ excité par DC, un couple est développé et l’armature tourne.
Il s’accélère à une vitesse à laquelle l’EMF induit dans les conducteurs d’armature équilibre la tension appliquée et l’équation de couple suivante du moteur à courant continu est satisfaite.
![]()

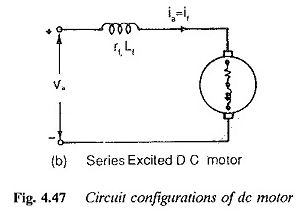
EB est l’EMF induit dans l’armature en raison de la rotation dans le champ magnétique uniforme à vitesse constante N. La nature de cet EMF est de s’opposer à la tension terminale et donc elle est également appelée EMF. Les conditions du circuit sont représentées sur la figure 4.47.
La figure 4.47 (a) représente un moteur excité séparément où l’excitation est fournie par un courant indépendant de l’IA. La figure 4.47 (b) illustre un moteur en série dans lequel les courants et les courants de champ sont les mêmes. La tension générée est donnée par


où
- Φ est un flux par pôle
- Z est un nombre de conducteurs d’inmarg
- N est la vitesse en régime
- 2p est le nombre de pôles
- 2a est le nombre de chemins parallèles dans l’armature
Pour un CC donné entraîne l’équation de base de la machine de base
![]()
où 
L’équation de couple du moteur à courant continu développé par l’armature est donnée par

KA est appelé constante d’inmature du moteur.

En utilisant les Eqs 4.23 et 4.25, nous avons

Dans un moteur excité séparément φ peut être supposé constant à un courant de champ donné lorsque la réaction de l’armature est négligée ou compensée.
De l’équation. 4.27 Il est clair que la vitesse d’un moteur à courant continu peut être variée en modifiant la valeur de (VA – iara).
L’équation de couple du moteur à courant continu est normalement réalisée de deux manières:
- En faisant varier la valeur de la tension appliquée à l’armature, comme cela est fait dans le système Ward Leonard (Fig. 4.48).
- En insérant une résistance supplémentaire en série avec l’armature (Fig. 4.49).

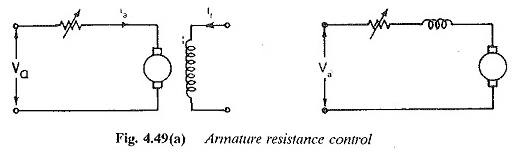

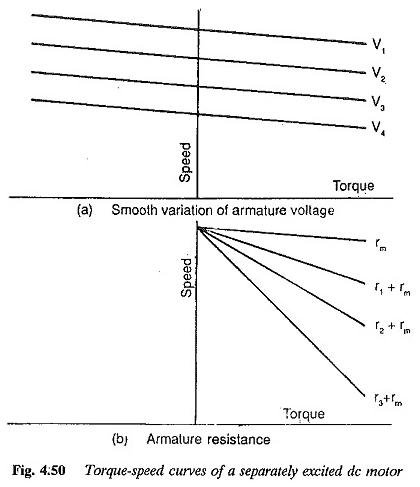
Dans le premier, une alimentation de tension variable est requise. L’opération est sans perte et efficace. L’équation de couple du moteur à courant continu en fonction de la caractéristique de vitesse est illustrée à la figure 4.50. Dans ce dernier, une résistance supplémentaire insérée implique des pertes supplémentaires et le moteur devient moins efficace.
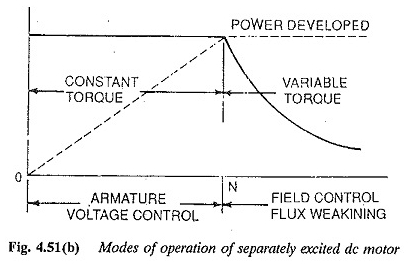
L’équation de couple de vitesse de la caractéristique du moteur à courant continu est représentée sur la figure 4.51. Dans les deux cas, de très petites vitesses jusqu’à zéro vitesse sont possibles. Le moteur fonctionne à un couple constant de zéro à la vitesse de base.

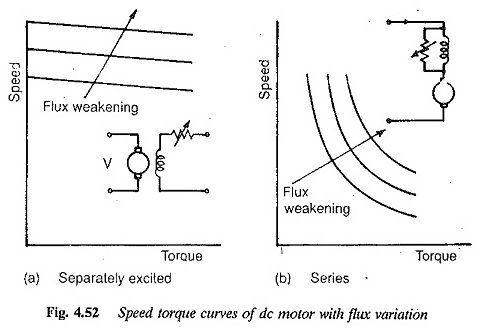
La vitesse d’un moteur à courant continu est également variée par la variation du flux de champ. Les vitesses au-dessus des vitesses de base sont possibles dans cette méthode de contrôle. Cette méthode convient aux charges de couple variables.
Le contrôle de vitesse au moyen d’une tension variable est très efficace. Cette tension variable est obtenue à partir d’un générateur. La méthode est connue sous le nom de méthode Ward Leonard. Il est très polyvalent et a les fonctionnalités suivantes:
- Le moteur peut être accéléré à un couple constant (courant d’armature constant) en ajustant convenablement le champ du moteur.
- Le freinage régénératif du moteur est possible et le moteur peut être mis au repos très rapidement.
- Quatre fonctionnement du quadrant du moteur sont simples.
- Le coût en capital est plus élevé, car un ensemble MG supplémentaire est requis.
- L’équipement nécessite de l’espace.
L’avènement des thyristors et le développement de convertisseurs de puissance à l’aide de thyristors ont rendu le contrôle de la vitesse des moteurs électriques plus facile et plus simple. Les redresseurs à commande de phase fournissent une tension CC variable à l’armature d’un moteur à courant continu (Fig. 4.53).
Ces convertisseurs peuvent également fonctionner comme onduleurs, auquel cas le freinage régénératif du moteur à courant continu est possible. Par une connexion appropriée de ces convertisseurs, un entraînement réversible permettant une automobile et une régénération dans les deux directions de rotation est possible.
Ces convertisseurs sont plus flexibles, ont une réponse plus rapide et occupent moins d’espace. Un système Leonard Ward statique peut être rendu possible en utilisant ces convertisseurs.
Cependant, il existe certains inconvénients, tels qu’un mauvais facteur de puissance du côté CA en raison du courant en retard, du courant d’entrée non sinusoïdal ayant une riche teneur en harmonique, etc. La tension de charge est superposée par une teneur en ondulation.
Le courant de charge a également une ondulation faisant des rapports de pic à courant moyen et de RMS à un courant moyen supérieur à un. Une grande inductance est requise du côté de la charge pour lisser le courant. Parfois, le courant de charge est discontinu, ce qui réduit les performances.
La teneur en ondulation affecte le chauffage et la commutation du moteur. Par conséquent, il est nécessaire de développer le redresseur qui fournit une alimentation au moteur ne provoquant que très peu de variations des performances par rapport à une alimentation en courant continu normal. Parfois, la conception du moteur à courant continu est modifiée afin qu’elle puisse être utilisée sur n’importe quel convertisseur.

Un moteur CC sur l’alimentation CC normale nécessite une résistance de départ pour limiter le courant de démarrage. Lorsqu’il est nourri à partir d’un convertisseur de thyristor, la résistance de démarrage peut être distribuée et le démarrage doux est possible. Le moteur peut être accéléré à un couple constant.
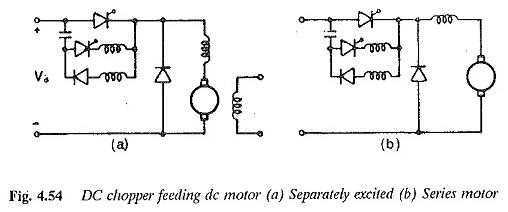
L’hopper CC peut être interposé entre les coussins roulants de tension fixe et le moteur CC fournit une tension variable au moteur pour contrôler la vitesse. La régénération est également possible dans ce cas. Un schéma de Leonard statique est possible pour les opérations de deux et quatre quadrants.
La tension de sortie du hachoir est sous la forme d’impulsions. Le rapport temps de l’hélicoteur peut être contrôlé pour varier la tension moyenne. Le courant de sortie varie de façon exponentielle pendant la tonne et le TOFF de l’hélico. Le courant de sortie varie entre deux limites.
Il y a une possibilité de conduction discontinue si l’ondulation est plus et le courant de charge est petit. L’hoppeur peut également être contrôlé avec des limites de courant spécifiées, la méthode étant connue sous le nom de contrôle de la limite de courant. Cela corrige la fréquence des hélicoptères.
La teneur en ondulation peut être limitée par un choix approprié des limites. Le contrôle de limite actuel est moins sujet à la conduction discontinue. L’augmentation de la fréquence des hélicoptères introduit des pertes. Le démarrage et l’accélération doux sont possibles.
Étant donné que la batterie fournit l’alimentation, les problèmes de contenu harmonique et le facteur de puissance sont absents.
Les performances d’un moteur à courant continu lorsqu’ils fonctionnent sur des convertisseurs contrôlés en phase ou des hélicoptères DC diffèrent beaucoup des performances lors du fonctionnement d’une alimentation CC normale.
La teneur en ondulation du courant de charge affecte les performances du moteur, tandis que les harmoniques et le mauvais facteur de puissance affectent les performances de la ligne. Une compréhension du comportement aide à améliorer le convertisseur ou la conception motrice, pour obtenir de meilleures performances.