Ecuación de torque de motor de corriente continua:
Cuando el voltaje CC se aplica al marco de un motor de corriente continuo con su campo excitado por DC, se desarrolla un par y se desarrolla el refuerzo.
Se acelera a una velocidad a la que el EMF induce en los égis de refuerzo equilibra el voltaje aplicado y se satisface la siguiente ecuación de par del motor DC.
![]()

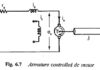
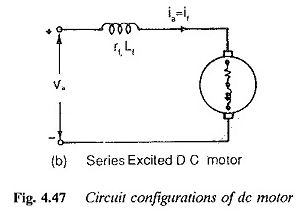
EB es el EMF induce en el refuerzo debido a la rotación en el campo magnético uniforme a una velocidad constante N. La naturaleza de este EMF es oponerse a la tensión terminal y, por lo tanto, también se llama EMF. Las condiciones del circuito se representan en la Figura 4.47.
La Figura 4.47 (a) representa un motor excitado por separado donde la excitación es proporcionada por una corriente independiente de IA. La Figura 4.47 (b) ilustra un motor en serie en el que los campos y los campos son los mismos. La tensión generada está dada por


O
- Φ es un flujo por polo
- Z es una serie de conductores de inmarg
- N es la velocidad en la dieta
- 2p es el número de polos
- 2a es el número de rutas paralelas en el marco
Para un CC dado conduce a la ecuación básica de la máquina básica
![]()
O 
La ecuación de par del motor de corriente continua desarrollada por el marco está dada por

KA se llama constante del motor.

Usando Eqs 4.23 y 4.25, tenemos

En un motor excitado por separado, se supone constante a una corriente de campo dada cuando la reacción del refuerzo se descuida u compensación.
De la ecuación. 4.27 Está claro que la velocidad de un motor de CC puede variar modificando el valor de (Va – iara).
La ecuación de par del motor DC normalmente se lleva a cabo de dos maneras:
- Al variar el valor de la tensión aplicada al refuerzo, como se hace en el sistema Ward Leonard (Fig. 4.48).
- Insertando resistencia adicional en serie con el refuerzo (Fig. 4.49).

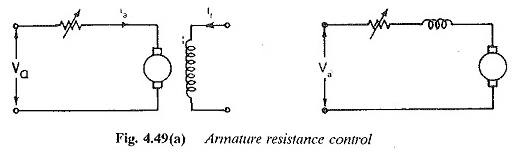

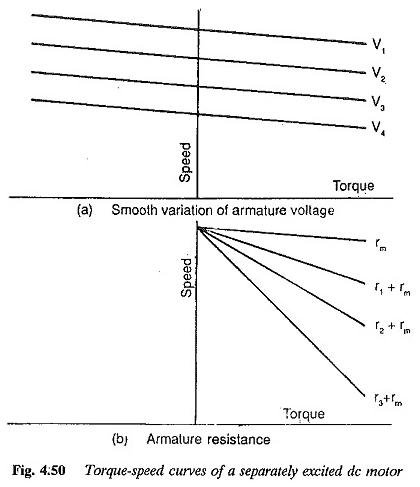
En el primero, se requiere una fuente de alimentación de voltaje variable. La operación es sin pérdidas y efectiva. La ecuación de par del motor DC dependiendo de la característica de velocidad se ilustra en la Figura 4.50. En este último, una resistencia adicional insertada implica pérdidas adicionales y el motor se vuelve menos efectivo.
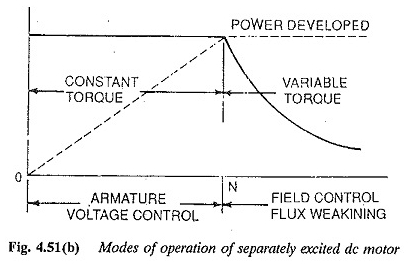
La ecuación de par de velocidad de la característica del motor DC se representa en la Figura 4.51. En ambos casos, es posible velocidades muy pequeñas hasta una velocidad cero. El motor funciona con un par constante de cero a velocidad básica.

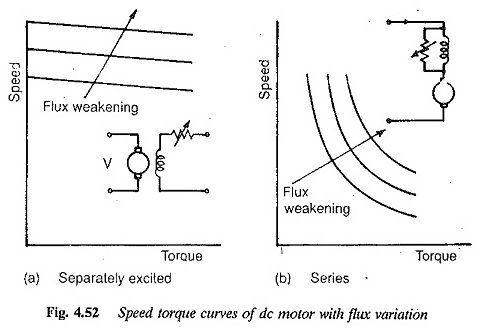
La velocidad de un motor DC también varía mediante la variación en el flujo de campo. Las velocidades por encima de las velocidades básicas son posibles en este método de control. Este método es adecuado para cargas de torque variables.
El control de velocidad con voltaje variable es muy efectivo. Este voltaje variable se obtiene de un generador. El método se conoce como Método Ward Leonard. Es muy versátil y tiene las siguientes características:
- El motor se puede acelerar al par constante (corriente de refuerzo constante) ajustando adecuadamente el campo del motor.
- El frenado regenerativo del motor es posible y el motor puede descansar muy rápidamente.
- Cuatro que operan el cuadrante del motor es simple.
- El costo de capital es mayor, porque se requiere un conjunto de MG adicional.
- El equipo requiere espacio.
El advenimiento de los tiristores y el desarrollo de convertidores de energía que utilizan tiristores hicieron que el control de la velocidad de los motores eléctricos sea más fácil y simple. Los rectificadores de control de fase proporcionan un voltaje CC variable al marco de un motor de CC (Fig. 4.53).
Estos convertidores también pueden funcionar como inversores, en cuyo caso es posible el frenado regenerativo del motor de corriente continua. Mediante una conexión apropiada de estos convertidores, es posible una capacitación reversible que permita un automóvil y una regeneración en las dos direcciones de rotación.
Estos convertidores son más flexibles, tienen una respuesta más rápida y ocupan menos espacio. Se puede hacer posible un sistema estático Leonard Ward utilizando estos convertidores.
Sin embargo, hay ciertos inconvenientes, como un factor de potencia malo en el lado de CA debido a la corriente tardía, la corriente de entrada no minusoidal con un contenido armónico rico, etc. El voltaje de carga se superpone con un contenido de onda.
La corriente de carga también tiene una ondulación con corriente media y RMS informa a una corriente promedio mayor que una. Se requiere una gran inductancia en el lado de la carga para suavizar la corriente. A veces, la corriente de carga es discontinua, lo que reduce el rendimiento.
El contenido de ondulación afecta la calefacción y el cambio del motor. En consecuencia, es necesario desarrollar el rectificador que proporciona una fuente de alimentación al motor que causa muy pocas variaciones en el rendimiento en comparación con una fuente de alimentación de corriente continua normal. A veces, el diseño del motor DC se modifica para que pueda usarse en cualquier convertidor.

Un motor CC en la potencia CC normal requiere una resistencia inicial para limitar la corriente de arranque. Cuando se alimenta de un convertidor de tiristores, se puede distribuir la resistencia de inicio y es posible el inicio suave. El motor se puede acelerar al par constante.
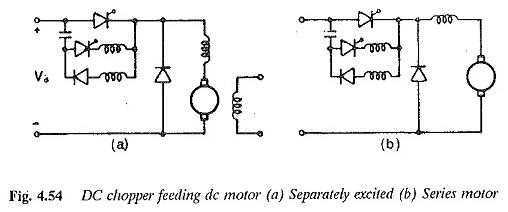
La tolva CC se puede interponerse entre los cojines de rodamiento de voltaje fijo y el motor CC proporciona un voltaje variable al motor para controlar la velocidad. La regeneración también es posible en este caso. Es posible un esquema de Leonard Static para las operaciones de dos y cuatro cuadrantes.
El voltaje de salida del helicóptero está en forma de pulsos. La relación de tiempo del helicóptero se puede controlar para variar la tensión promedio. La corriente de salida varía exponencialmente durante la tonelada y el toff del helicóptero. La corriente de salida varía entre dos límites.
Existe la posibilidad de una conducción discontinua si la ondulación es más y la corriente de carga es pequeña. La tolva también se puede verificar con límites de corriente especificados, el método se conoce como control de límite actual. Esto corrige la frecuencia de los helicópteros.
El contenido de ondulación puede estar limitado por una elección apropiada de límites. El control límite actual está menos sujeto a la conducción discontinua. El aumento en la frecuencia de los helicópteros introduce pérdidas. El dulce comienzo y la aceleración son posibles.
Dado que la batería proporciona alimentos, los problemas de contenido armónico y el factor de potencia están ausentes.
El rendimiento de un motor de CC cuando se operan en convertidores controlados en helicópteros de fase o DC difieren mucho del rendimiento cuando se opera la fuente de alimentación CC normal.
El contenido actual de la corriente afecta el rendimiento del motor, mientras que los armónicos y el mal factor de potencia afectan el rendimiento de la línea. Una comprensión del comportamiento ayuda a mejorar el diseño del convertidor o motor para obtener un mejor rendimiento.