Inicio y control de la velocidad de los motores de tracción CC:
Comenzar y controlar la velocidad de los motores de tracción CC: como ya se discutió, solo las series compuestas y los motores de CC son adecuados para el trabajo de tracción.
Motores de traccion de corriente continua – motor de traccion
Con un motor de la serie DC, la corriente y el par de corriente se pueden reducir fortaleciendo el campo o bajando el voltaje del terminal o ambos. Los motores se pueden colocar en la serie, reduciendo el voltaje terminal de cada uno sin pérdida de resistencia externa.
La resistencia externa se puede colocar en serie con los motores para limitar la corriente de arranque a cualquier valor deseado, y al variar la resistencia, la corriente puede mantenerse constante durante el período de martillos como se desea, porque el EMF trasero está en construcción.
Dado que el par máximo al comenzar requiere resistencia completa en el suelo, cualquier conexión de derivación o campo reducido generalmente se rechaza al inicio.
Con el motor compuesto DC, el arranque se puede hacer con una corriente de refuerzo completa en la serie de la serie y la corriente máxima en las bobinas de campo de derivación.
Una resistencia de inicio insertada en el circuito de refuerzo se reduce en las etapas hasta que el marco y el campo en serie están conectados a través de la línea.
Un aumento en la velocidad adicional se ve afectado por la reducción de la corriente del campo de derivación en los pasos hasta el punto de desconectar el devanado del campo de derivación, y la acción es idéntica a la de un motor estándar simple.
A continuación se analizan varios métodos utilizados para comenzar y controlar los motores de tracción DC.
1. Control reostático
Se puede iniciar una serie en serie conectando una resistencia externa (arrancador) en serie con el circuito principal del motor.
En el momento inicial, dado que el EMF trasero desarrollado por el motor es cero, por lo tanto, la resistencia conectada en serie con el motor es máximo y es de tal valor que el voltaje cae a través de él con una corriente de carga completa es igual al voltaje de línea.
A medida que el motor se acelera, el EMF trasero desarrollado por el motor aumenta, por lo tanto, la resistencia externa se reduce gradualmente para mantener la corriente constante durante todo el período de inicio o aceleración.
El circuito básico del motor de tracción con arranque reostático se ilustra en la Figura 13.1. En este método, hay una pérdida considerable de energía en el circuito externo.
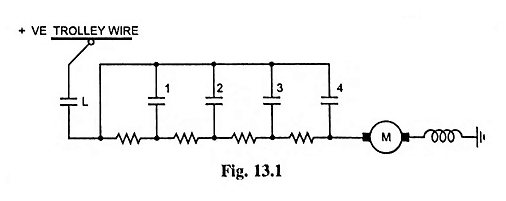
Las resistencias utilizadas están diseñadas para una calificación a corto plazo y no para una calificación continua porque son necesarias para transportar la corriente solo al comenzar los motores. Por lo tanto, el motor puede tener solo una característica de velocidad.
2. Control paralelo de la serie
El principal inconveniente del desperdicio de energía eléctrica en el control reostático se superará en parte en este método cuando hay dos o más motores.

En el caso de dos motores, los motores se conectan primero en serie entre sí y una resistencia de inicio o control como se ilustra en la Figura 13.2 (a).
El controlador corta gradualmente la resistencia adicional cuando los motores alcanzan la velocidad y finalmente la resistencia de control se elimina por completo, luego cada motor tiene la mitad del voltaje de la línea a través de él, como se muestra en la Figura 13.2 (b). Esta es la primera posición de ejecución.
En esta posición para un valor dado de corriente de refuerzo, cada motor funcionará a la mitad de su velocidad normal.
Dado que no hay resistencia externa en el circuito, no hay desperdicio de energía y, por lo tanto, los motores funcionan con una eficiencia casi igual a la disponible con un voltaje de línea completo en el terminal de cada motor.
En el siguiente paso, los dos motores están conectados en paralelo y en serie con una resistencia variable R, como se muestra en la Figura 13.2 (c).
Esta resistencia se corta gradualmente cuando los motores alcanzan la velocidad y finalmente cuando esta resistencia se elimina por completo del circuito, como se ilustra en la Figura 13.2 (d), se obtiene la segunda posición de carrera.
En esta posición, cada motor está conectado a través del voltaje de línea completo. Un diagrama de conexiones que ilustra la secuencia de conmutación se da en la Figura 13.3.

3. Control de campo.
Como la velocidad del motor es inversamente proporcional al flujo (suponiendo una constante de voltaje de línea), la velocidad puede variar variando el flujo.
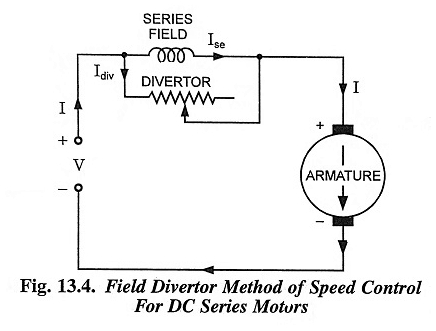
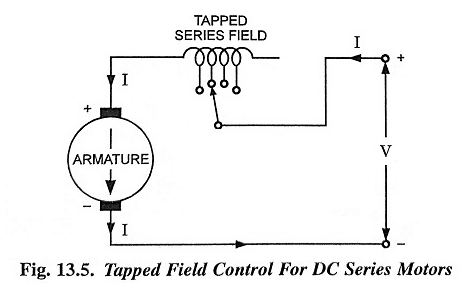
En el caso de los motores en serie, el flujo puede variarse (i) conectando una resistencia variable conocida como entretenimiento en paralelo con el devanado de la serie de la serie (consulte la Figura 13.4) o (ii) cortando algunos de los giros en el campo de la serie (ver Figura 13.5).
Dado que en ambos casos, el flujo solo puede reducirse, este método se conoce como método de debilitamiento de campo y se pueden obtener las velocidades mayores de lo normal.
Mediante este método, la velocidad se puede aumentar en el 15 al 30% de la velocidad normal debido a las dificultades de diseño resultantes de los motores de tracción.
El método para debilitar el campo es sin uso para fines de salida. Este método se utiliza para aumentar la velocidad de los motores de tracción hasta el 10 o 15% cuando han alcanzado la máxima velocidad posible por el sistema de control paralelo de la serie. La ventaja de este sistema es que aumenta la flexibilidad de la utilidad del tren.
Por ejemplo, para el servicio de la ciudad, la velocidad requerida es baja y es necesario comenzar y detenerse frecuentes, el equipo puede funcionar con el campo completo.
Cuando el mismo vehículo debe usarse para líneas suburbanas y interurbanas, donde se necesitan velocidades más altas, se requeriría un cambio en la relación de velocidad. Usando el método del campo de control de velocidad, se puede eliminar la necesidad de modificar la relación de velocidad.
Por lo tanto, se puede utilizar un tipo de equipo para operar varios tipos de servicios con consumo de energía razonable.
4. Control de la locomotora del generador de motor
Todo el generador del motor generalmente consiste en un motor sincrónico monófrónico que lleva a uno o dos generadores CC y un excitador en el mismo árbol. El conjunto generalmente se inicia y resalta mediante un motor inicial y se sincroniza automáticamente cuando alcanza la velocidad.
El voltaje del generador está regulado por el control del campo desde el excitador, por lo tanto, no se requiere resistencia en el circuito de dibujo del motor de tracción o el control paralelo de la serie es necesario para obtener velocidades de funcionamiento económico o ahorrar pérdidas de reóstato en el control del motor de tracción.
A veces se usa una disposición paralela en la serie para ahorrar el tamaño y el peso del generador.
5. Control de la locomotora eléctrica diesel
Como ya se discutió anteriormente, la locomotora eléctrica diesel ha adquirido importancia en las últimas décadas y ha reemplazado en gran medida la locomotora de vapor, en muchas regiones del mundo.
Principalmente, un reproductor diesel-eléctrico, como se usa en la locomotora, es un sistema de conversión de potencia autónomo en el que un motor diesel proporciona potencia a los motores de tracción a través de un generador CC que funciona.
Por lo tanto, hay tres partes fundamentales en la locomotora diesel, a saber, el motor diesel, el generador de CC y los motores de tracción de la serie DC.
El motor diesel conduce al generador y el generador proporciona una fuente de alimentación CC a los motores de tracción, que a su vez alimentan la potencia del patrón para conducir el vehículo. El campo del generador está excitado indirectamente por una batería cuya tensión puede variar según un reostato.
El voltaje de la batería varía a su vez la tensión de un excitador auxiliar o un amplidyne y esto excita el generador principal.
Por lo tanto, el voltaje del generador está bajo control y esta forma de control hace rejillas de resistencia innecesaria en los circuitos principales del motor para proteger los motores de tracción para comenzar y acelerar.
La velocidad del motor normalmente está controlada por un regulador de carga que carga el motor en función de la configuración del controlador.
Este regulador mantiene automáticamente una salida constante, porque si el motor requiere más combustible de lo que se proporciona para el ajuste, el regulador reduce la excitación del campo y, por lo tanto, evita el motor ganado. Hay varios tipos de control del motor diesel, pero todos siguen este principio.