Start en controle van de snelheid van tractie -motoren CC:
Het starten en regelen van de snelheid van CC -tractiemotoren – zoals reeds besproken, zijn alleen gecomponeerde series en DC -motoren geschikt voor tractiewerk.
Tractie motoren
Met een DC -serie -motor kunnen de stroomstroom en het koppel worden verminderd door het veld te versterken of de spanning van de terminal of beide te verlagen. De motoren kunnen in serie worden geplaatst, waardoor de terminalspanning van elk zonder verlies van externe weerstand wordt verminderd.
De externe weerstand kan in serie worden geplaatst met de motoren om de startstroom te beperken tot elke gewenste waarde, en door de weerstand te variëren, kan de stroom constant worden gehandhaafd tijdens de periode van hamers als gewenst, omdat de achterste EMF in aanbouw is.
Omdat het maximale koppel bij het starten volledige weerstand op de grond vereist, wordt elke verbinding van het shunt- of verminderd veld in het algemeen afgewezen bij het opstarten.
Met de DC -samengestelde motor kan het begin worden gemaakt met een volledige versterkingsstroom in de reeks van de serie en de maximale stroom in shuntveldspoelen.
Een start -upweerstand ingebracht in het versterkingscircuit wordt in fasen verminderd totdat het frame en het serieveld zijn verbonden door de lijn.
Een toename van extra snelheid wordt beïnvloed door de vermindering van de shuntveldstroom in stappen tot het punt waar de wikkeling van het shuntveld wordt losgekoppeld en de actie dan identiek is aan die van een eenvoudige standaardmotor.
Verschillende methoden die worden gebruikt voor het starten en regelen van DC -tractiemotoren worden hieronder besproken.
1. Reostatische controle
Een serie in serie kan worden gestart door een externe weerstand (starter) in serie te verbinden met het hoofdmotorcircuit.
Op het beginmoment, omdat de door de motor ontwikkelde achterste EMF nul is, is de weerstand die in serie is verbonden met de motor maximaal en is het van een dergelijke waarde dat de spanning erdoorheen daalt met een volledige laadstroom is gelijk aan de lijnspanning.
Naarmate de motor versnelt, neemt de door de motor ontwikkelde EMF toe, daarom wordt de externe weerstand geleidelijk verminderd om de constante stroom gedurende de start- of versnellingsperiode te behouden.
Het basiscircuit van de tractiemotor met reostatische start wordt geïllustreerd in figuur 13.1. In deze methode is er een aanzienlijk verlies van energie in het externe circuit.
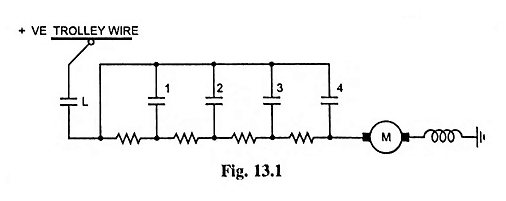
De gebruikte weerstanden zijn ontworpen voor kortetermijnbeoordeling en niet voor continue beoordeling omdat ze nodig zijn om de stroom alleen te vervoeren bij het starten van de motoren. De motor kan daarom slechts één snelheidskarakteristiek hebben.
2. Parallelle controle over de serie
Het belangrijkste nadeel van verspilling van elektrische energie in reostatische controle wordt gedeeltelijk overwonnen in deze methode wanneer er twee of meer motoren zijn.

In het geval van twee motoren worden de motoren eerst in serie met elkaar verbonden en een start- of besturingsweerstand zoals geïllustreerd in figuur 13.2 (a).
De extra weerstand wordt geleidelijk door de controller gesneden wanneer de motoren de snelheid bereiken en uiteindelijk de besturingsweerstand volledig wordt verwijderd, dan heeft elke motor de helft van de spanning van de lijn erdoor, zoals weergegeven in figuur 13.2 (b). Dit is de eerste lopende positie.
In deze positie voor een bepaalde waarde van versterkingsstroom werkt elke motor op de helft van zijn normale snelheid.
Aangezien er geen externe weerstand in het circuit is, is er geen verspilling van energie en daarom werken de motoren op een efficiëntie die bijna gelijk is aan die beschikbaar met een volledige lijnspanning op de terminal van elke motor.
In de volgende stap zijn de twee motoren parallel verbonden en in serie met een variabele weerstand R, zoals weergegeven in figuur 13.2 (c).
Deze weerstand wordt geleidelijk gesneden wanneer de motoren snelheid bereiken en ten slotte wanneer deze weerstand volledig uit het circuit wordt verwijderd, zoals geïllustreerd in figuur 13.2 (d), wordt de tweede racepositie verkregen.
In deze positie is elke motor verbonden via de volledige lijnspanning. Een verbindingsdiagram ter illustratie van de schakelsequentie wordt gegeven in figuur 13.3.

3. Veldbesturing.
Omdat het motortoerental omgekeerd evenredig is met de stroom (uitgaande van een lijnspanningsconstante), kan de snelheid daarom variëren door de stroom te variëren.
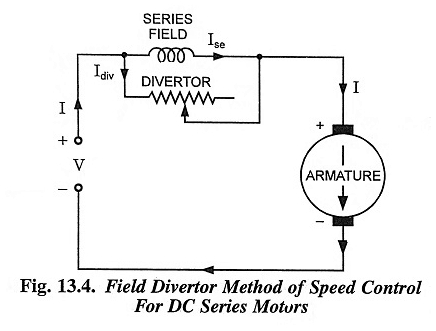
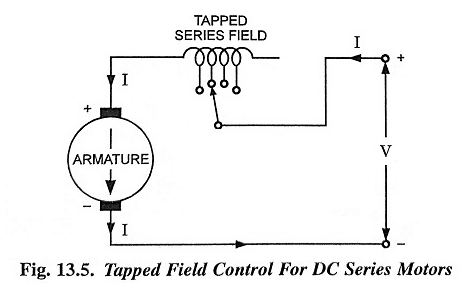
In het geval van seriële motoren kan de stroom worden gevarieerd (i) door een variabele weerstand te verbinden die bekend staat als entertainment parallel met de kronkeling van de serie van de serie (zie figuur 13.4) of (ii) door enkele van de beurten in het veld van de serie te snijden (zie figuur 13.5).
Omdat in beide gevallen de stroom alleen kan worden verminderd, staat deze methode bekend als de veldverzwakkingsmethode en kan de snelheden die groter zijn dan normaal worden verkregen.
Volgens deze methode kan de snelheid worden verhoogd met 15 tot 30% van de normale snelheid vanwege de ontwerpproblemen die voortvloeien uit tractie -motoren.
De methode om het veld te verzwakken is zonder gebruik voor vertrekdoeleinden. Deze methode wordt gebruikt om de snelheid van tractie -motoren tot 10 of 15% te verhogen wanneer ze maximaal mogelijke snelheid hebben bereikt door het parallelle besturingssysteem van de serie. Het voordeel van dit systeem is dat het de flexibiliteit van het treinhulpprogramma vergroot.
Voor de stadsservice is de vereiste snelheid bijvoorbeeld laag en frequent starten en stoppen zijn noodzakelijk, de apparatuur kan werken met het volledige veld.
Wanneer hetzelfde voertuig moet worden gebruikt voor lijnen in de voorsteden en een interurban waar hogere snelheden nodig zijn, zou een verandering in de snelheidsverhouding nodig zijn. Met behulp van de snelheidsregelveldmethode kan de noodzaak om de snelheidsverhouding te wijzigen worden geëlimineerd.
Aldus kan een type apparatuur worden gebruikt om verschillende soorten services te bedienen met een redelijk energieverbruik.
4. Controle van de locomotief van de motorgenerator
De hele motorgenerator bestaat over het algemeen uit een monofronische synchrone motor die een of twee CC -generatoren en een excitator op dezelfde boom leidt. De set wordt over het algemeen gestart en gemarkeerd door een startmotor en automatisch gesynchroniseerd wanneer deze snelheid bereikt.
De generatorspanning wordt gereguleerd door controle van het veld uit de excitator, daarom is geen weerstand vereist in het tekencircuit van de tractie -engine of de parallelle besturing van de serie is nodig om economische functioneringssnelheden te verkrijgen of reostaatverliezen te besparen in de controle van de tractiemotor.
Een parallelle opstelling in serie wordt soms gebruikt om de grootte en het gewicht van de generator te bewaren.
5. Controle van de diesel elektrische locomotief
Zoals eerder al besproken, heeft de Diesel Electric Locomotive de afgelopen decennia belangrijk geworden en heeft in veel regio’s van de wereld de stoomlocomotief grotendeels vervangen.
Vooral een diesel-elektrische speler, zoals gebruikt op de locomotief, is een autonoom stroomconversiesysteem waarin een dieselmotor stroom biedt aan tractiemotoren via een CC-generator die het werkt.
Er zijn dus drie fundamentele onderdelen in de diesellocomotief, namelijk de dieselmotor, de DC -generator en de tractiemotoren van de DC -serie.
De dieselmotor leidt naar de generator en de generator biedt een CC -voeding naar tractiemotoren, die op zijn beurt het vermogen van het patroon voeden om het voertuig aan te drijven. Het generatorveld is indirect opgewonden door een batterij waarvan de spanning kan variëren door een reostaat.
De batterijspanning varieert in de beurt de spanning van een hulpeexcitator of een amplidyne en dit boeit de hoofdgenerator.
De generatorspanning is daarom onder controle en deze vorm van controle maakt onnodige weerstandsnetten in de hoofdmotorcircuits om de tractiemotoren te beschermen om te starten en te versnellen.
Het motortoerental wordt normaal geregeld door een laadregelaar die de motor laadt als een functie van de instelling van de controller.
Deze regulator handhaaft automatisch een constante uitgang, want als de motor meer brandstof nodig heeft dan voor aanpassing, vermindert de regelaar de excitatie van het veld en voorkomt dus dat de motor heeft gewonnen. Er zijn verschillende soorten dieselmotorbesturing, maar ze volgen allemaal dit principe.