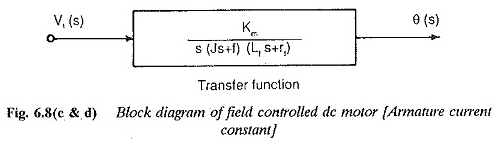
Funkcja transferu silnika CC kontrolowanego przez pole:
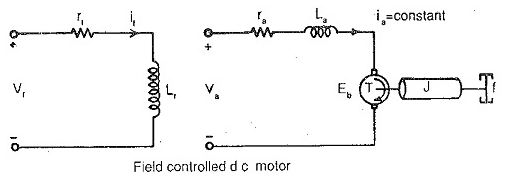
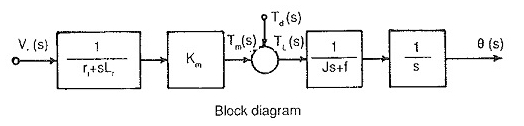
Prędkość silnika prądu ciągłego może się różnić w zależności od prądu pola. Prędkość można zwiększyć poza podstawową prędkość poprzez zmniejszenie prądu pola. Rysunek 6.8 (C&D) pokazuje funkcję przenoszenia silnika DC kontrolowanego przez pole.
W tego rodzaju kontroli kontroli stały moment obrotowy nie jest możliwy, ponieważ prąd wzmacniający wzrosiłby do niebezpiecznych wartości do niskich przepływów. Dlatego konieczne jest utrzymanie prądu wzmacniającego o stałej wartości na wszystkich poziomach przepływu. Prąd pola jest zróżnicowany.
Wzmocnienie jest również zapewniane za pomocą prostownika kontrolnego fazowego w celu utrzymania stałego prądu zbrojenia. Wyprowadzając funkcję przenoszenia, zaniedbywane są skutki nasycenia i reakcji reakcji.


Moment obrotowy opracowany przez silnik
![]()
W funkcji transferu silnika prądu stałego kontrolowanego przez pole, jak wskazano powyżej, prąd zbrojenia jest stały, a prąd pola jest zmienny. Dlatego mamy
![]()
Równanie funkcji przenoszenia silnika ciągłego kontrolowanego przez pole jest podana przez
![]()
Dynamiczne równanie silnika jest
![]()
Transformacje Laplace des Eqs 6.22 – 6.24 z zerowymi warunkami początkowymi są podane przez

Wyeliminuj go z równania. 6.26 i uproście, że otrzymujemy
Lub
Km = k2 / (rf.f) stały wzmocnienie silnika
TF = LF / RF Pole stała czasowa
TM = J / F stały czas mechaniczny.
Ponieważ indukcyjności pola nie można zaniedbać, funkcja przenoszenia silnika ciągłego kontrolowanego przez pole posiadającą prędkość jako ilość zmiennej jest systemem drugiego rzędu. Schemat blokowy systemu i jego funkcja przenoszenia przedstawiono na rysunku 6.8 (d).
Porównanie silników CC kontrolowanych i kontrolowanych w terenie:
