Rozpocznij i kontrola prędkości silników trakcyjnych CC:
Uruchomienie i kontrolowanie prędkości silników trakcyjnych CC – Jak już omówiono, tylko złożone serie i silniki DC są odpowiednie do pracy trakcji.
W przypadku silnika serii DC prąd prąd i moment obrotowy można zmniejszyć poprzez wzmocnienie pola lub obniżenie napięcia zacisku lub obu. Silniki można umieszczać szeregowo, zmniejszając napięcie końcowe każdego bez utraty oporu zewnętrznego.
Zewnętrzny opór można umieścić szeregowo z silnikami, aby ograniczyć prąd początkowy do dowolnej pożądanej wartości, a poprzez zmianę rezystancji prąd można utrzymać stałą w okresie hammerów zgodnie z potrzebami, ponieważ tylny emf jest w budowie.

Ponieważ maksymalny moment obrotowy podczas uruchamiania wymaga całkowitego oporu na ziemi, każde połączenie bocznikowego lub zredukowanego pola jest ogólnie odrzucane podczas uruchamiania.
W przypadku silnika złożonego DC start może być wykonany z pełnym prądem zbrojenia w serii i maksymalnym prądem w cewkach bocznych.

Odporność na początek wstawioną do obwodu zbrojenia jest zmniejszona, aż rama i pole serii zostaną podłączone przez linię.
Na wzrost dodatkowej prędkości wpływa na zmniejszenie prądu pola buntu w stopniach do punktu, w którym uzwojenie pola bocznikowego jest odłączone, a działanie jest wówczas identyczne z prostym standardowym silnikiem.
Różne metody stosowane do uruchamiania i kontrolowania silników trakcyjnych DC omówiono poniżej.
1. Kontrola reostatyczna
Serię w serii można rozpocząć, podłączając opór zewnętrzny (starter) w szeregu z głównym obwodem silnika.
W momencie początkowym, ponieważ tylny EMF opracowany przez silnik wynosi zero, zatem rezystancja połączona szeregowo z silnikiem jest maksymalna i ma taką wartość, że napięcie spada przez niego z pełnym prądem obciążenia, jest równe napięciu linii.
Gdy silnik przyspiesza, tylny emf rozwinięty przez silnik wzrasta, zatem opór zewnętrzny jest stopniowo zmniejszany w celu utrzymania stałego prądu przez okres początkowego lub przyspieszenia.
Podstawowy obwód silnika trakcyjnego z początkiem reostatycznym pokazano na rysunku 13.1. W tej metodzie występuje znaczna utrata energii w obwodzie zewnętrznym.
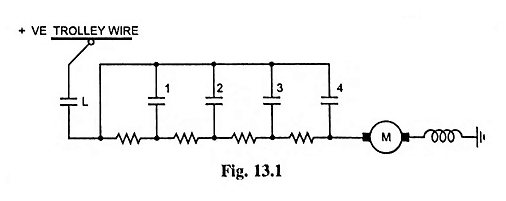
Zastosowane rezystory są zaprojektowane do krótkoterminowej oceny, a nie do ciągłej oceny, ponieważ są one niezbędne do transportu prądu tylko podczas uruchamiania silników. Silnik może zatem mieć tylko jedną charakterystykę prędkości.
2. Równoległa kontrola serii
Główna wada marnotrawstwa energii elektrycznej w kontroli reostatycznej jest częściowo zdobiąca w tej metodzie, gdy istnieją dwa lub więcej silników.

W przypadku dwóch silników silniki są najpierw połączone szeregowo ze sobą i odporność początkową lub kontrolną, jak pokazano na rysunku 13.2 (a).
Dodatkowa rezystancja jest stopniowo wycinana przez kontroler, gdy silniki osiągają prędkość, a na koniec rezystancja sterowania jest całkowicie usuwana, a następnie każdy silnik ma połowę napięcia linii, jak pokazano na rysunku 13.2 (b). To jest pierwsza pozycja biegowa.
W tej pozycji dla danej wartości prądu zbrojeniowego każdy silnik będzie działał z połową swojej normalnej prędkości.
Ponieważ w obwodzie nie ma oporu zewnętrznego, nie ma marnotrawstwa energii, a zatem silniki działają z wydajnością prawie równą tej dostępnej z pełnym napięciem linii na zacisku każdego silnika.
W następnym etapie dwa silniki są połączone równolegle i szeregowo ze zmienną rezystancją R, jak pokazano na rysunku 13.2 (c).
Ta oporność jest stopniowo wycinana, gdy silniki osiągają prędkość i na koniec, gdy ta rezystancja zostanie całkowicie usunięta z obwodu, jak pokazano na rysunku 13.2 (d), uzyskuje się drugą pozycję wyścigu.
W tej pozycji każdy silnik jest podłączony przez pełne napięcie linii. Schemat połączeń ilustrujący sekwencję przełączania podano na rysunku 13.3.

3. Kontrola pola.
Ponieważ prędkość silnika jest odwrotnie proporcjonalna do przepływu (zakładając stałą napięcia linii), prędkość może się zatem różnić w zależności od przepływu.
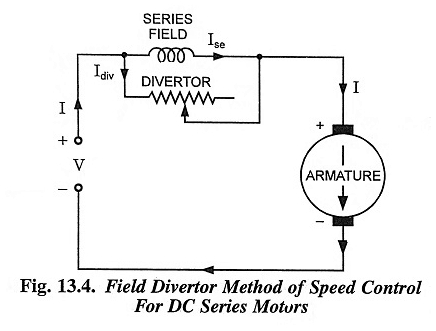
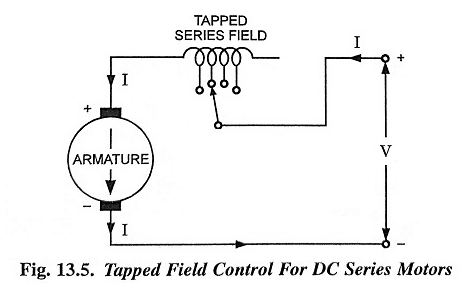
W przypadku silników szeregowych przepływ można zmieniać (i) poprzez połączenie zmiennego oporu znanego równolegle z uzwojeniem serii serii (patrz rysunek 13.4) lub (ii) poprzez wycięcie niektórych zakrętów w polu serii (patrz rysunek 13.5).
Ponieważ w obu przypadkach przepływ można jedynie zmniejszyć, metoda ta jest znana jako metoda osłabienia pola i można uzyskać prędkości większe niż normalnie.
Za pomocą tej metody prędkość można zwiększyć o 15 do 30% normalnej prędkości z powodu trudności projektowych wynikających z silników trakcyjnych.
Metoda osłabienia pola jest bez użycia do celów odlotu. Ta metoda służy do zwiększenia prędkości silników trakcyjnych do 10 lub 15%, gdy osiągnęły maksymalną możliwą prędkość przez równoległy system sterowania serii. Zaletą tego systemu jest to, że zwiększa on elastyczność użyteczności pociągu.
Na przykład dla usługi miejskiej wymagana prędkość jest niska i konieczne jest częste uruchomienie i zatrzymanie, sprzęt może współpracować z pełnym polem.
Gdy ten sam pojazd musi być używany do linii podmiejskich i interurbanu, w których konieczna jest wyższa prędkości, wymagana byłaby zmiana współczynnika prędkości. Za pomocą metody pola sterowania prędkością można wyeliminować potrzebę modyfikacji współczynnika prędkości.
Dlatego do obsługi różnych rodzajów usług można wykorzystać rodzaj sprzętu o rozsądnym zużyciu energii.
4. Kontrola lokomotywy generatora silnika
Cały generator silnika ogólnie składa się z monofronicznego silnika synchronicznego prowadzącego jeden lub dwa generatory CC i podekscytatora na tym samym drzewie. Zestaw jest ogólnie uruchamiany i wyróżniany przez silnik początkowy i automatycznie zsynchronizowany, gdy osiągnie prędkość.
Napięcie generatora jest regulowane przez kontrolę pola z podekscytatora, dlatego nie jest wymagany opór w obwodzie rysunku silnika trakcyjnego lub konieczna jest równoległa kontrola serii, aby uzyskać ekonomiczne prędkości funkcjonowania lub zaoszczędzić straty reostatu w kontroli silnika trakcyjnego.
Równoległe układ szeregowy jest czasem używany do oszczędzania wielkości i wagi generatora.
5. Kontrola lokomotywy elektrycznej oleju napędowego
Jak już wspomniano wcześniej, lokomotywa oleju elektrycznego nabrała znaczenia w ostatnich dziesięcioleciach i w dużej mierze zastąpiła lokomotywę parową w wielu regionach świata.
Głównie odtwarzacz oleju elektrycznego, stosowany w lokomotywie, jest autonomicznym systemem konwersji mocy, w którym silnik Diesla zapewnia silniki trakcyjne za pośrednictwem generatora CC.
Zatem istnieją trzy podstawowe części w lokomotywie Diesla, a mianowicie silnik Diesla, generator DC i silniki trakcyjne z serii DC.
Silnik Diesla prowadzi do generatora, a generator zapewnia zasilanie CC do silników trakcyjnych, które z kolei zasilają moc wzoru do napędzania pojazdu. Pole generatora jest pośrednio podekscytowane baterią, której napięcie może się różnić w zależności od reostatu.
Napięcie akumulatora różni się z kolei napięcie podekscytatora pomocniczego lub amplidyne, a to podnieca główny generator.
Napięcie generatora jest zatem pod kontrolą, a ta forma kontroli powoduje, że niepotrzebne siatki oporowe w głównych obwodach silnika w celu ochrony silników trakcyjnych w celu uruchomienia i przyspieszenia.
Prędkość silnika jest zwykle kontrolowana przez regulator obciążenia, który ładuje silnik jako funkcję ustawienia sterownika.
Ten regulator automatycznie utrzymuje stałą moc wyjściową, ponieważ jeśli silnik wymaga więcej paliwa niż przewidziany do regulacji, regulator zmniejsza wzbudzenie pola, a tym samym zapobiega wygranej silnika. Istnieje kilka rodzajów kontroli silnika Diesla, ale wszystkie one podążają za tą zasadą.