Função de transferência de motor CC controlada pelo reforço:
A velocidade de um motor CC pode ser controlada variando a tensão aplicada à estrutura de um motor CC. Um motor CC excitado separadamente com uma tensão de reforço variável encontra o aplicativo como um motor de acionamento em um player de velocidade variável.
A tensão de reforço variável é fornecida por um retificador controlado na fase. O diagrama de uma função de transferência do motor CC controlado pelo reforço é ilustrado na Figura 6.7.
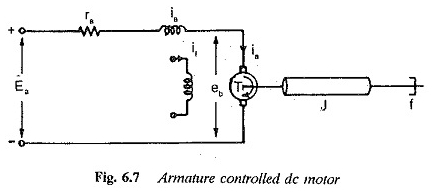

O torque desenvolvido pelo mecanismo CC
![]()

Ou

Φ é um fluxo de espaço aéreo
IA é uma corrente de reforço
K é uma constante
Dimigindo os efeitos da saturação e reação da reação, temos o fluxo de espaço aéreo proporcional à corrente do campo. Isso é ![]()
Porque se o casal desenvolvido é dado por
![]()
onde KT é o motor constante. A tensão de reforço da EA é fornecida pelo conversor do tiristor. A equação do circuito incomum é dada por 
EB na Eq. 6.7 é a rotação EMF (traseira) induzida no quadro e é proporcional ao produto e ao produto. No entanto, o fluxo do motor é constante. Consequentemente, a equação dinâmica do motor que fornece o equilíbrio do torque pode ser escrita como 
Supondo que as condições iniciais sejam zero, as transformações do Laplace das Eqs 6.7, 6.8 e 6.9 podem ser escritas como

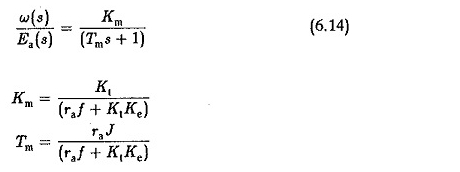
Tomando EA (s) como entrada e W (s) como saída, a função de transferência W (s) / EA (s) pode ser obtida eliminando as equações e é dada por

O diagrama de blocos fornecido na Figura 6.8 (a) representa a equação. 6.13. Em última análise, isso pode ser reduzido para um único bloco dado na Figura 6.8 (b).
Normalmente, a indutância do reforço é muito pequena e pode ser negligenciada. A função de transferência neste caso é dada por
Podemos ver que a EMF traseira afeta o amortecimento do sistema. Uma função de transferência entre a velocidade e o torque de carga pode ser derivada assumindo que a outra entrada EA é zero. Nesse caso, a equação dinâmica seria
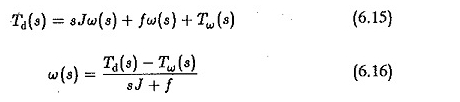
Mas das eqs 6.10 e 6.11, temos

Substituindo na equação. 6.15 e simplificar que obtemos


onde k é constante. Se os pólos desta função de transferência forem conjugados complexos, a mudança de velocidade para uma mudança no torque de carga será oscilatória.
