Início e controle da velocidade dos motores de tração CC:
Iniciando e controlando a velocidade dos mecanismos de tração CC – Como já discutido, apenas os mecanismos de série e DC compostos são adequados para o trabalho de tração.
Com um motor da série DC, a corrente e o torque atual podem ser reduzidos ao fortalecer o campo ou diminuir a tensão do terminal ou ambos. Os motores podem ser colocados em série, reduzindo a tensão terminal de cada um sem perda de resistência externa.
A resistência externa pode ser colocada em série com os motores para limitar a corrente de partida a qualquer valor desejado e, variando a resistência, a corrente pode ser mantida constante durante o período dos martelos conforme desejado, porque a EMF traseira está em construção.

Como o torque máximo ao iniciar requer resistência completa no solo, qualquer conexão de derivação ou campo reduzido é geralmente rejeitado na inicialização.
Com o mecanismo de composto CC, o início pode ser feito com uma corrente de reforço completa na série da série e a corrente máxima nas bobinas de campo de shunt.

Uma resistência de início -up inserida no circuito de reforço é reduzida nos estágios até que o quadro e o campo da série sejam conectados através da linha.
Um aumento na velocidade adicional é afetado pela redução da corrente do campo de derivação nas etapas até o ponto em que o enrolamento do campo de derivação é desconectado e a ação é então idêntica à de um motor padrão simples.
Vários métodos utilizados para iniciar e controlar os motores de tração CC são discutidos abaixo.
1 Controle reostático
Uma série em série pode ser iniciada conectando uma resistência externa (iniciante) em série com o circuito principal do motor.
No momento inicial, uma vez que o EMF traseiro desenvolvido pelo motor é zero, portanto, a resistência conectada em série com o motor é máxima e é de tal valor que a tensão cai através dele com uma corrente de carga completa é igual à tensão da linha.
À medida que o motor acelera, a EMF traseira desenvolvida pelo motor aumenta, portanto, a resistência externa é gradualmente reduzida para manter a corrente constante durante todo o período de partida ou aceleração.
O circuito básico do mecanismo de tração com início reostático é ilustrado na Figura 13.1. Neste método, há uma perda considerável de energia no circuito externo.
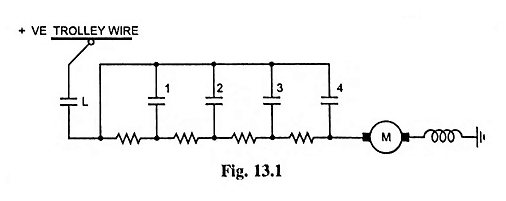
Os resistores utilizados são projetados para classificação de curto prazo e não para classificação contínua, porque são necessários para transportar a corrente somente ao iniciar os motores. O motor pode, portanto, ter apenas uma característica de velocidade.
2. Controle paralelo da série
A principal desvantagem do desperdício de energia elétrica no controle reostático é parcialmente encimado neste método quando há dois ou mais motores.

No caso de dois motores, os motores são conectados pela primeira vez em série entre si e uma resistência inicial ou de controle, conforme ilustrado na Figura 13.2 (a).
A resistência adicional é gradualmente cortada pelo controlador quando os motores atingem a velocidade e, finalmente, a resistência ao controle é completamente removida, então cada motor possui metade da tensão da linha através dela, como mostra a Figura 13.2 (b). Esta é a primeira posição em execução.
Nesta posição, para um determinado valor de corrente de reforço, cada motor operará na metade de sua velocidade normal.
Como não há resistência externa no circuito, não há desperdício de energia e, portanto, os motores operam em uma eficiência quase igual à disponível com uma tensão de linha completa no terminal de cada motor.
Na próxima etapa, os dois motores são conectados em paralelo e em série com uma resistência variável R, como mostrado na Figura 13.2 (c).
Essa resistência é gradualmente cortada quando os motores atingem a velocidade e, finalmente, quando essa resistência é completamente removida do circuito, conforme ilustrado na Figura 13.2 (d), a segunda posição da corrida é obtida.
Nesta posição, cada motor é conectado através da tensão de linha completa. Um diagrama de conexões que ilustra a sequência de comutação é apresentado na Figura 13.3.

3. Controle de campo.
Como a velocidade do motor é inversamente proporcional ao fluxo (assumindo uma constante de tensão de linha), a velocidade pode, portanto, variar variando o fluxo.
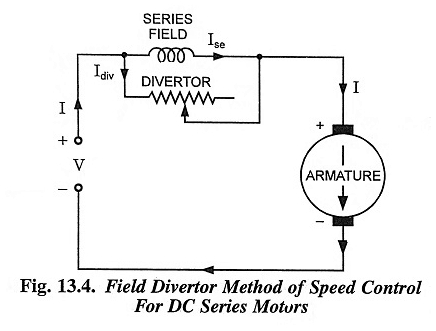
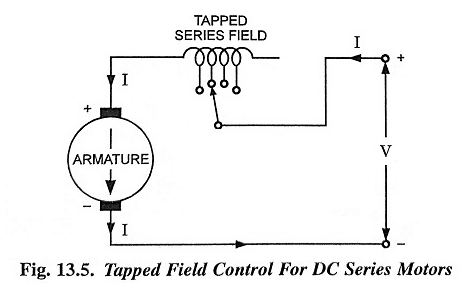
No caso dos motores seriais, o fluxo pode ser variado (i) conectando uma resistência variável conhecida como entretenimento em paralelo com o enrolamento da série da série (consulte a Figura 13.4) ou (ii) cortando algumas das voltas no campo da série (veja a Figura 13.5).
Como em ambos os casos, o fluxo só pode ser reduzido, esse método é conhecido como método de enfraquecimento do campo e as velocidades maiores que o normal podem ser obtidas.
Por esse método, a velocidade pode ser aumentada em 15 a 30% da velocidade normal devido às dificuldades de projeto resultantes de motores de tração.
O método de enfraquecer o campo é sem uso para fins de partida. Esse método é usado para aumentar a velocidade dos motores de tração em até 10 ou 15% quando atingem a velocidade máxima possível pelo sistema de controle paralelo da série. A vantagem desse sistema é que ele aumenta a flexibilidade da utilidade do trem.
Por exemplo, para o serviço da cidade, a velocidade necessária é baixa e a partida e a parada frequentes são necessárias, o equipamento pode funcionar com o campo completo.
Quando o mesmo veículo deve ser usado para linhas suburbanas e interurbanos, onde são necessárias velocidades mais altas, seria necessária uma alteração na taxa de velocidade. Usando o método do campo de controle de velocidade, a necessidade de modificar a taxa de velocidade pode ser eliminada.
Assim, um tipo de equipamento pode ser usado para operar vários tipos de serviços com consumo razoável de energia.
4. Controle da locomotiva do gerador do motor
Todo o gerador do motor geralmente consiste em um motor síncrono monofrônico que lidera um ou dois geradores CC e um excitador na mesma árvore. O conjunto geralmente é iniciado e destacado por um motor de partida e sincronizado automaticamente quando atinge a velocidade.
A tensão do gerador é regulada pelo controle do campo do excitador; portanto, não é necessária resistência no circuito de desenho do mecanismo de tração ou no controle paralelo da série para obter velocidades de funcionamento econômico ou salvar perdas de reostato no controle do mecanismo de tração.
Às vezes, um arranjo paralelo em série é usado para economizar o tamanho e o peso do gerador.
5. Controle da locomotiva elétrica a diesel
Como já discutido anteriormente, a locomotiva elétrica a diesel assumiu a importância nas últimas décadas e substituiu amplamente a locomotiva a vapor, em muitas regiões do mundo.
Principalmente um player diesel-elétrico, usado na locomotiva, é um sistema de conversão de energia autônomo no qual um motor a diesel fornece energia para motores de tração por meio de um gerador CC que funciona.
Assim, existem três partes fundamentais na locomotiva a diesel, a saber, o motor a diesel, o gerador DC e os mecanismos de tração da série DC.
O motor a diesel leva ao gerador e o gerador fornece uma fonte de alimentação CC aos motores de tração, que por sua vez alimentam a potência do padrão para acionar o veículo. O campo do gerador é indiretamente excitado por uma bateria cuja tensão pode variar de acordo com um reostato.
A tensão da bateria varia, por sua vez, a tensão de um excitador auxiliar ou um amplidyne e isso excita o gerador principal.
A tensão do gerador está, portanto, sob controle e essa forma de controle faz grades de resistência desnecessárias nos principais circuitos do motor para proteger os motores de tração para iniciar e acelerar.
A velocidade do motor é normalmente controlada por um regulador de carga que carrega o motor em função da configuração do controlador.
Esse regulador mantém automaticamente uma saída constante, porque se o mecanismo exigir mais combustível do que o fornecido para ajuste, o regulador reduz a excitação do campo e, portanto, impede que o motor vencesse. Existem vários tipos de controle do motor a diesel, mas todos seguem esse princípio.