Alan tarafından kontrol edilen bir CC motorunun aktarma işlevi:
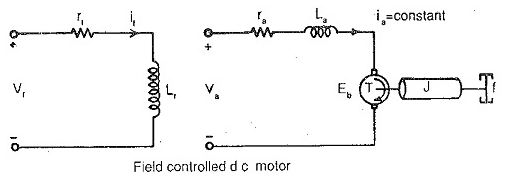
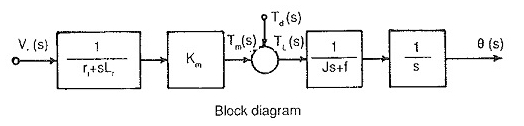
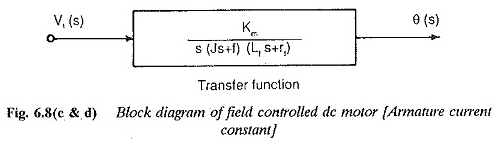
Sürekli bir akım motorunun hızı, alan akımını değiştirerek değişebilir. Hız, saha akımını azaltarak temel hızın ötesinde artırılabilir. Şekil 6.8 (C&D), alan tarafından kontrol edilen bir DC motorunun transfer fonksiyonunu göstermektedir.
Bu tip kontrol kontrolünde, sabit tork mümkün değildir, çünkü takviye akımı düşük akışlara tehlikeli değerlere yükselecektir. Bu nedenle, takviye akımını tüm akış seviyelerinde sabit bir değerde tutmak gerekir. Alan akımı çeşitlidir.
Takviye, sabit bir takviye akımını korumak için bir faz kontrol doğrultucu vasıtasıyla da sağlanır. Transfer fonksiyonunu elde ederken, doygunluk ve reaksiyon reaksiyonunun etkileri ihmal edilir.


Motor tarafından geliştirilen tork
![]()
Alan tarafından kontrol edilen bir DC motorunun aktarım fonksiyonunda, yukarıda belirtildiği gibi, takviye akımı sabittir ve alan akımı değişkendir. Bu nedenle,
![]()
Alan tarafından kontrol edilen sürekli bir akım motorunun transfer fonksiyonunun denklemi,
![]()
Dinamik motor denklemi
![]()
Sıfır başlangıç koşulları ile Laplace Des EQS 6.22 – 6.24’ün dönüşümleri

Denklemden ortadan kaldırın. 6.26 ve elde ettiğimizi basitleştirin
Veya
Km = k2 / (rf.f) sabit motor kazancı
Tf = lf / rf saha zaman sabiti
Tm = j / f sabit mekanik zaman.
Alanın endüktansı ihmal edilemediğinden, değişken bir miktar olarak hıza sahip alan tarafından kontrol edilen sürekli bir akım motorunun transfer fonksiyonu ikinci dereceden bir sistemdir. Sistem bloğu diyagramı ve transfer fonksiyonu Şekil 6.8 (d) ‘de temsil edilmektedir.
Sahada kontrol edilen ve kontrol edilen CC motorların karşılaştırılması:
