Çekiş motorlarının hızının başlatılması ve kontrolü CC:
CC çekiş motorlarının hızını başlatma ve kontrol etme – daha önce tartışıldığı gibi, sadece oluşturulan seri ve DC motorları çekiş çalışmaları için uygundur.
Bir DC serisi motorla, akım ve tork, alanın güçlendirilmesi veya terminalin veya her ikisinin voltajını düşürerek azaltılabilir. Motorlar seri olarak yerleştirilebilir, dış direnç kaybı olmadan her birinin terminal voltajını azaltır.
Dış direnç, başlangıç akımını istenen herhangi bir değerle sınırlamak için motorlarla seri olarak yerleştirilebilir ve direnci değiştirerek, akım istendiği gibi çekiçler süresi boyunca sabit tutulabilir, çünkü arka EMF yapım aşamasındadır.

Başlangıçta maksimum tork, zeminde tam bir direnç gerektirdiğinden, başlangıçta şant veya azaltılmış alanın herhangi bir bağlantısı reddedilir.
DC bileşik motoru ile başlangıç, seri serisinde tam bir takviye akımı ve şant alanı bobinlerindeki maksimum akım ile yapılabilir.

Takviye devresine yerleştirilen bir başlangıç direnci, çerçeve ve seri alanı hattan bağlanana kadar aşamalarda azalır.
Ek hızdaki bir artış, şant alanının sarılmasının bağlantısının kesildiği noktaya kadar adım alan akımının azaltılmasından etkilenir ve eylem daha sonra basit bir standart motorla aynıdır.
DC çekiş motorlarını başlatmak ve kontrol etmek için kullanılan çeşitli yöntemler aşağıda tartışılmaktadır.
1. Reostatik kontrol
Bir dizi seri, ana motor devresiyle seri olarak harici bir direnç (marş) bağlayarak başlatılabilir.
Başlangıç anında, motor tarafından geliştirilen arka EMF sıfır olduğundan, motorla seri olarak bağlanan direnç maksimumdur ve voltajın tam bir yük akımı ile düşmesi hat voltajına eşittir.
Motor hızlandıkça, motor tarafından geliştirilen arka EMF artar, bu nedenle, başlangıç veya hızlanma süresi boyunca sabit akımı korumak için dış direnç kademeli olarak azalır.
Çekiş motorunun reostatik başlangıçlı temel devresi Şekil 13.1’de gösterilmiştir. Bu yöntemde, dış devrede önemli bir enerji kaybı vardır.
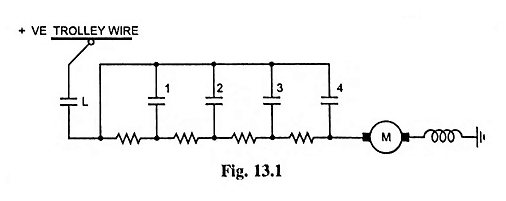
Kullanılan dirençler, sürekli derecelendirme için değil, kısa vadeli derecelendirme için tasarlanmıştır, çünkü akımı sadece motorları çalıştırırken taşımak için gereklidirler. Bu nedenle motorun sadece bir hız özelliği olabilir.
2. Serinin paralel kontrolü
Reostatik kontrolde elektrik enerjisi israfının ana dezavantajı, iki veya daha fazla motor olduğunda bu yöntemde kısmen aşılır.

İki motor durumunda, motorlar ilk olarak birbirleriyle seri olarak bağlanır ve Şekil 13.2 (a) ‘da gösterildiği gibi bir başlangıç veya kontrol direnci.
Motorlar hıza ulaştığında ve son olarak kontrol direnci tamamen çıkarıldığında ek direnç yavaş yavaş kontrolör tarafından kesilir, daha sonra her motor, Şekil 13.2 (b) ‘de gösterildiği gibi, hattın voltajının yarısına sahiptir. Bu ilk koşu pozisyonudur.
Belirli bir takviye akımı değeri için bu pozisyonda, her motor normal hızının yarısında çalışacaktır.
Devrede harici bir direnç olmadığından, enerji israfı yoktur ve bu nedenle motorlar, her motorun terminalinde tam bir çizgi voltajı ile mevcut olana eşit bir verimlilikte çalışır.
Bir sonraki adımda, iki motor paralel ve seri olarak Şekil 13.2 (c) ‘de gösterildiği gibi değişken bir direnç r ile bağlanır.
Bu direnç, motorlar hıza ulaştığında yavaş yavaş kesilir ve son olarak bu direnç devreden tamamen çıkarıldığında, Şekil 13.2 (d) ‘de gösterildiği gibi, ikinci yarış pozisyonu elde edilir.
Bu pozisyonda, her motor tam çizgi voltajından bağlanır. Anahtarlama dizisini gösteren bir bağlantı şeması Şekil 13.3’te verilmiştir.

3. Alan Kontrolü.
Motor hızı akışla ters orantılı olduğundan (bir çizgi voltajı sabiti varsayılarak), bu nedenle hız akışı değiştirerek değişebilir.
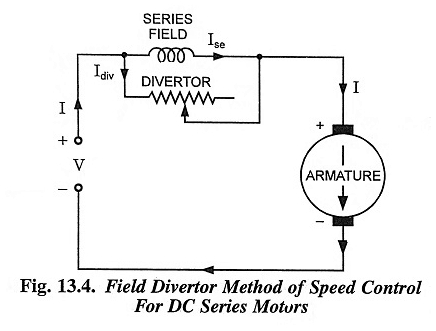
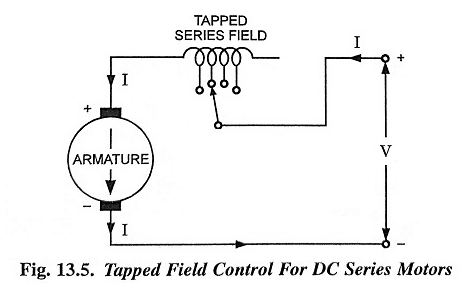
Seri motorlar söz konusu olduğunda, akış (i) eğlence olarak bilinen bir değişken direnci serinin serisinin sarılmasına paralel olarak bağlanarak (Şekil 13.4) veya (ii) serinin alanındaki bazı dönüşleri keserek değiştirilebilir (bkz. Şekil 13.5).
Her iki durumda da akış sadece azaltılabildiğinden, bu yöntem alan zayıflatma yöntemi olarak bilinir ve normalden daha büyük hızlar elde edilebilir.
Bu yöntemle, çekiş motorlarından kaynaklanan tasarım zorlukları nedeniyle hız normal hızın% 15 ila 30’u arttırılabilir.
Alanı zayıflatma yöntemi, kalkış amacıyla kullanılmamıştır. Bu yöntem, serinin paralel kontrol sistemi tarafından mümkün olan maksimum hıza ulaştıklarında, çekiş motorlarının hızını% 10 veya% 15’e kadar arttırmak için kullanılır. Bu sistemin avantajı, tren yardımcı programının esnekliğini artırmasıdır.
Örneğin, şehir hizmeti için, gereken hız düşüktür ve sık başlangıç ve durdurma gereklidir, ekipman tam alanla çalışabilir.
Aynı araç banliyö hatları ve daha yüksek hızların gerekli olduğu interurban için kullanılması gerektiğinde, hız oranında bir değişiklik gerekecektir. Hız kontrol alanı yöntemini kullanarak, hız oranını değiştirme ihtiyacı ortadan kaldırılabilir.
Böylece, makul enerji tüketimi ile çeşitli hizmet türlerini çalıştırmak için bir tür ekipman kullanılabilir.
4. Motor jeneratör lokomotifinin kontrolü
Motor jeneratörü genellikle bir veya iki CC jeneratöre liderlik eden bir monofronik senkron motordan ve aynı ağaçta bir uyarımdan oluşur. Set genellikle bir başlangıç motoru tarafından başlatılır ve vurgulanır ve hıza ulaştığında otomatik olarak senkronize edilir.
Jeneratör voltajı, tarlanın uyarımdan kontrolü ile düzenlenir, bu nedenle, çekiş motorunun çizim devresinde direnç gerekmez veya ekonomik işlev hızları elde etmek veya çekiş motorunun kontrolünde reostat kayıplarından tasarruf etmek için serinin paralel kontrolü gerekli değildir.
Serideki paralel bir düzenleme bazen jeneratörün boyutunu ve ağırlığını kurtarmak için kullanılır.
5. Dizel elektrikli lokomotifin kontrolü
Daha önce tartışıldığı gibi, dizel elektrikli lokomotif son on yıllarda önem kazanmıştır ve dünyanın birçok bölgesinde buhar lokomotifinin yerini almıştır.
Temel olarak, lokomotifte kullanıldığı gibi dizel elektrikli bir oyuncu, bir dizel motorun çalıştığı bir CC jeneratörü aracılığıyla çekiş motorlarına güç sağladığı otonom bir güç dönüşüm sistemidir.
Bu nedenle, dizel lokomotifte üç temel parça vardır, yani dizel motor, DC jeneratörü ve DC serisinin çekiş motorları.
Dizel motor jeneratöre yol açar ve jeneratör, çekiş motorlarına bir CC güç kaynağı sağlar ve bu da aracı sürmek için desenin gücünü besler. Jeneratör alanı dolaylı olarak gerilimi bir reostat ile değişebilen bir pil tarafından uyarılır.
Pil voltajı, yardımcı bir uyarıcının veya bir amplidynenin gerginliğini değiştirir ve bu da ana jeneratörü heyecanlandırır.
Bu nedenle jeneratör voltajı kontrol altındadır ve bu kontrol biçimi, çekiş motorlarının başlamasını ve hızlanmasını korumak için ana motor devrelerinde gereksiz direnç ızgaraları yapar.
Motor hızı normalde motoru kontrolör ayarının bir fonksiyonu olarak yükleyen bir yük regülatörü tarafından kontrol edilir.
Bu regülatör otomatik olarak sabit bir çıkışı korur, çünkü motor ayar için sağlanandan daha fazla yakıt gerektirirse, regülatör alanın uyarılmasını azaltır ve böylece motorun kazanılmasını önler. Birkaç dizel motor kontrolü vardır, ancak hepsi bu prensibi takip eder.