Démarrage et contrôle de la vitesse des moteurs de traction CC:
Le démarrage et le contrôle de la vitesse des moteurs de traction CC – comme déjà discuté, seules les séries et les moteurs à courant continu composés conviennent aux travaux de traction.
Avec un moteur de la série DC, le courant et le couple produits à l’arrêt peuvent être réduits en renforçant le champ ou en abaissant la tension du terminal ou les deux. Les moteurs peuvent être placés en série, réduisant la tension de borne de chacun sans perte de résistance externe.
La résistance externe peut être placée en série avec les moteurs pour limiter le courant de démarrage à n’importe quelle valeur souhaitée, et en faisant varier la résistance, le courant peut être maintenu constant pendant la période de marteaux comme souhaité, car l’EMF arrière est en cours de construction.

Étant donné que le couple maximum lors du démarrage exige une résistance complète sur le terrain, toute connexion de shunt ou de champ réduit est généralement rejetée au démarrage.
Avec le moteur composé DC, le début peut être fait avec un courant d’armature complet dans les bobines de champ de la série et le courant maximum dans les bobines de champ shunt.

Une résistance de démarrage insérée dans le circuit d’armature est réduite par étapes jusqu’à ce que l’armature et le champ série soient connectés à travers la ligne.
Une augmentation de la vitesse supplémentaire est affectée par la réduction du courant de champ de shunt en étapes jusqu’au point où l’enroulement du champ de shunt est déconnecté, et l’action est ensuite identique à celle d’un moteur de série simple.
Diverses méthodes utilisées pour le démarrage et le contrôle de la vitesse des moteurs de traction DC sont discutées ci-dessous.
1. Contrôle rhéostatique
Un moteur en série peut être démarré en connectant une résistance externe (démarreur) en série avec le circuit principal du moteur.
À l’instant de départ, puisque l’EMF arrière développé par le moteur est nul, par conséquent, la résistance connectée en série avec le moteur est maximale et est d’une telle valeur que la tension baisse à travers elle avec un courant de charge à pleine charge est égal à la tension de ligne.
Au fur et à mesure que le moteur accélère, l’EMF arrière développé par le moteur augmente, par conséquent, la résistance externe est progressivement réduite afin de maintenir le courant constant tout au long de la période de départ ou d’accélération.
Le circuit de base du moteur de traction avec démarrage rhéostatique est illustré à la figure 13.1. Dans cette méthode, il y a une perte d’énergie considérable dans le circuit externe.
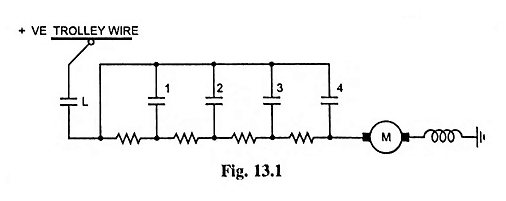
Les résistances employées sont conçues pour la notation de courte durée et non pour la notation continue car ils sont nécessaires pour transporter le courant uniquement lors du démarrage des moteurs. Le moteur ne peut donc avoir qu’une seule caractéristique de vitesse.
2. Contrôle parallèle de la série
Le principal inconvénient du gaspillage d’énergie électrique dans le contrôle rhéostatique est en partie surmonté dans cette méthode lorsqu’il y a deux moteurs ou plus.

Dans le cas de deux moteurs, les moteurs sont d’abord connectés en série les uns avec les autres et une résistance de départ ou de contrôle comme illustré sur la figure 13.2 (a).
La résistance supplémentaire est progressivement coupée par le contrôleur lorsque les moteurs atteignent la vitesse et enfin la résistance de contrôle est totalement supprimée, puis chaque moteur a une moitié de la tension de la ligne à travers elle, comme le montre la figure 13.2 (b). Il s’agit de la première position de course.
Dans cette position pour une valeur donnée de courant d’armature, chaque moteur fonctionnera à la moitié de sa vitesse normale.
Puisqu’il n’y a pas de résistance externe dans le circuit, il n’y a pas de gaspillage d’énergie et donc les moteurs fonctionnent à une efficacité presque égale à celle disponible avec une tension de ligne complète sur la borne de chaque moteur.
À l’étape suivante, les deux moteurs sont connectés en parallèle et en série avec une résistance variable R, comme le montre la figure 13.2 (c).
Cette résistance est progressivement coupée lorsque les moteurs atteignent la vitesse et enfin lorsque cette résistance est totalement retirée du circuit, comme illustré sur la figure 13.2 (d), la deuxième position de course est obtenue.
Dans cette position, chaque moteur est connecté à travers la tension de ligne complète. Un diagramme de connexions illustrant la séquence de commutation est donné sur la figure 13.3.

3. Contrôle du champ.
Comme la vitesse du moteur est inversement proportionnelle au flux (en supposant une constante de tension de ligne), la vitesse peut donc varier en variant le flux.
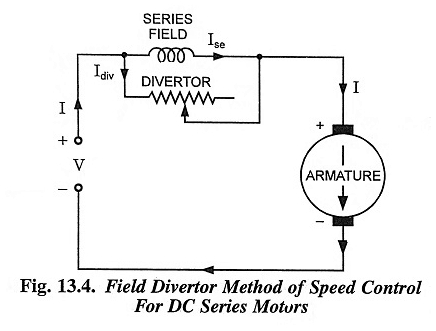
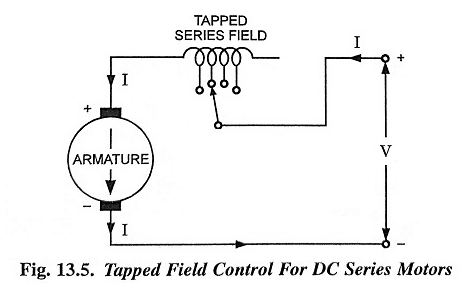
Dans le cas des moteurs de série, le flux peut être varié (i) en connectant une résistance variable connue sous le nom de diverteur en parallèle avec l’enroulement du champ de la série (reportez-vous à la figure 13.4) ou (ii) en coupant certains des virages sur le terrain de la série (reportez-vous à la figure 13.5).
Étant donné que dans les deux cas, le flux ne peut être réduit que, cette méthode est connue sous le nom de méthode d’affaiblissement du champ et les vitesses supérieures à la normale peuvent être obtenues.
Par cette méthode, la vitesse peut être augmentée de 15 à 30% de la vitesse normale en raison des difficultés de conception résultant de moteurs de traction.
La méthode d’affaiblissement du champ est sans usage à des fins de départ. Cette méthode est utilisée pour augmenter la vitesse des moteurs de traction jusqu’à 10 ou 15% lorsqu’ils ont atteint une vitesse maximale possible par le système de contrôle parallèle de la série. L’avantage de ce système est qu’il augmente la flexibilité de l’utilitaire de train.
Par exemple pour le service de la ville, la vitesse requise est faible et fréquente le démarrage et l’arrêt sont nécessaires, l’équipement peut fonctionner avec le champ complet.
Lorsque le même véhicule doit être utilisé pour les lignes de banlieue et interurban où des vitesses plus élevées sont nécessaires, il faudrait un changement dans le rapport de vitesse. En utilisant la méthode d’affaiblissement du champ de contrôle de la vitesse, la nécessité de modifier le rapport de vitesse peut être éliminée.
Ainsi, un type d’équipement peut être utilisé pour exploiter divers types de services avec une consommation d’énergie raisonnable.
4. Contrôle de la locomotive du générateur de moteur
L’ensemble du générateur de moteur se compose généralement d’un moteur synchrone monophronique conduisant un ou deux générateurs CC et d’un excitateur sur le même arbre. L’ensemble est généralement démarré et mis en valeur par un moteur de départ et synchronisé automatiquement lorsqu’il atteint la vitesse.
La tension du générateur est régulée au moyen du contrôle du champ à partir de l’excitateur, par conséquent, aucune résistance n’est requise dans le circuit d’alimentation du moteur de traction ni le contrôle parallèle de la série est nécessaire pour obtenir des vitesses de fonctionnement économiques ou économiser des pertes de rhéostat dans le contrôle du moteur de traction.
Un arrangement parallèle en série est parfois utilisé pour permettre l’économie de la taille et du poids du générateur.
5. Contrôle de la locomotive électrique diesel
Comme déjà discuté précédemment, la locomotive électrique diesel a pris de l’importance au cours des dernières décennies et a largement remplacé la locomotive à vapeur, dans de nombreuses régions du monde.
Principalement un lecteur diesel-électrique, tel qu’utilisé sur la locomotive, est un système autonome de conversion de puissance dans laquelle un moteur diesel fournit de la puissance aux moteurs de traction via un générateur CC qu’il fonctionne.
Ainsi, il existe trois parties fondamentales dans la locomotive diesel, à savoir le moteur diesel, le générateur DC et les moteurs de traction de la série DC.
Le moteur diesel entraîne le générateur et le générateur fournit une alimentation CC aux moteurs de traction, qui à leur tour alimentent la puissance du motif pour conduire le véhicule. Le champ du générateur est indirectement excité par une batterie dont la tension peut varier par un rhéostat.
La tension de la batterie varie à son tour la tension d’un excitateur auxiliaire ou d’un amplidyne et cela excite le générateur principal.
La tension du générateur est donc sous contrôle et cette forme de contrôle fait des grilles de résistance inutiles dans les circuits du moteur principal pour protéger les moteurs de traction pour démarrer et accélérer.
La vitesse du moteur est normalement contrôlée par un régulateur de charge qui charge le moteur en fonction du réglage du contrôleur.
Ce régulateur maintient automatiquement une sortie constante, car si le moteur exige plus de carburant que prévu pour le réglage, le régulateur réduit l’excitation du champ et empêche ainsi le décroche du moteur. Il existe plusieurs types de contrôle du moteur diesel, mais ils suivent tous ce principe.